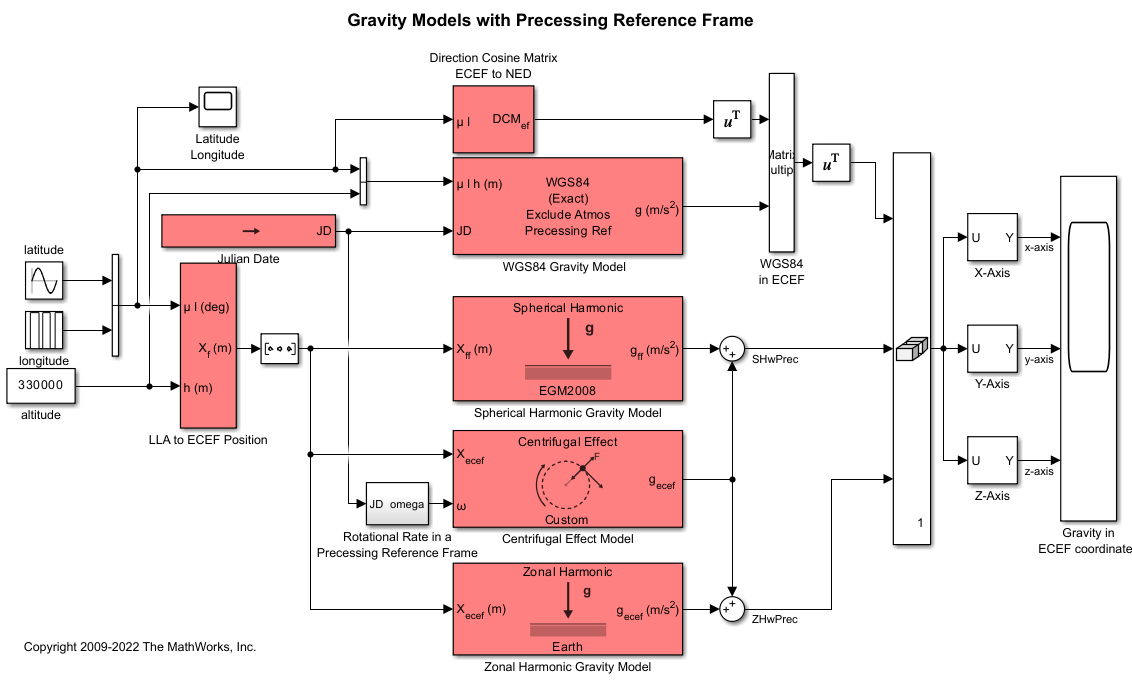
LLA to ECEF Position
Calculate Earth-centered Earth-fixed (ECEF) position from geodetic latitude, longitude, and altitude above planetary ellipsoid

Libraries:
Aerospace Blockset /
Utilities /
Axes Transformations
Description
The LLA to ECEF Position block converts geodetic latitude , longitude , and altitude above the planetary ellipsoid into a 3-by-1 vector of ECEF position . Latitude and longitude values can be any value. However, latitude values of +90 and -90 may return unexpected values because of singularity at the poles. For more information the ECEF position calculation, see Algorithms.
Limitations
The planet is assumed to be ellipsoidal. To use a spherical planet, set the Flattening parameter to zero.
The implementation of the ECEF coordinate system assumes that the origin is at the center of the planet, the x-axis intersects the Greenwich meridian and the equator, the z-axis is the mean spin axis of the planet, positive to the north, and the y-axis completes the right-handed system.
Ports
Input
Output
Parameters
Algorithms
The ECEF position is calculated from the geocentric latitude at mean sea-level (λs) and longitude using:
where geocentric latitude at mean sea-level and the radius at a surface point (rs) are defined by flattening , and equatorial radius in the following relationships:
References
[1] Stevens, B. L., and F. L. Lewis. Aircraft Control and Simulation, Hoboken, NJ: John Wiley & Sons, 1992.
[2] Zipfel, Peter H., Modeling and Simulation of Aerospace Vehicle Dynamics. Second Edition. Reston, VA: AIAA Education Series, 2000.
[3] Recommended Practice for Atmospheric and Space Flight Vehicle Coordinate Systems, R-004-1992, ANSI/AIAA, February 1992.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)