Séquencement de gain
Un contrôleur à gains-séquencés est un contrôleur dont les gains sont ajustés automatiquement en fonction du temps, des conditions de fonctionnement ou des paramètres du système physique. Le séquencement de gain est une stratégie commune de contrôle des systèmes dont la dynamique évolue en fonction du temps ou des conditions de fonctionnement. Ces systèmes englobent des systèmes linéaires aux paramètres variables (LPV) et des classes nombreuses de systèmes non linéaires. Pour régler des contrôleurs à gains séquencés dans MATLAB® ou Simulink®, vous devez représenter le gain variable en tant que fonction des variables de séquencement au moyen de la commande tunableSurface. Pour une présentation du workflow de réglage des contrôleurs à gains séquencés, voir Gain Scheduling Basics.
Fonctions
Blocs
Rubriques
Systèmes de contrôle à gains séquencés
- Gain Scheduling Basics
Gain scheduling is an approach to control of non-linear systems using a family of linear controllers, each providing satisfactory control for a different operating point of the system. - Model Gain-Scheduled Control Systems in Simulink
In Simulink, model gain schedules using lookup tables, interpolation blocks, or MATLAB Function blocks.
Réglage des séquencements de gain
- Tune Gain Schedules in Simulink
Understand the general tuning workflow for usingsystuneto tune gain-scheduled controllers. - Plant Models for Gain-Scheduled Controller Tuning
To tune a gain-scheduled control system, you need a collection of linear models describing the plant dynamics at the selected design points. - Multiple Design Points in slTuner Interface
For tuning a gain-scheduled control system, associate a family of linear plant models with theslTunerinterface to your Simulink model. - Parameterize Gain Schedules
A gain surface parameterizes a variable gain in terms of the scheduling variables. Use gain surfaces to model variable gains in a gain-scheduled control system. - Change Requirements with Operating Condition
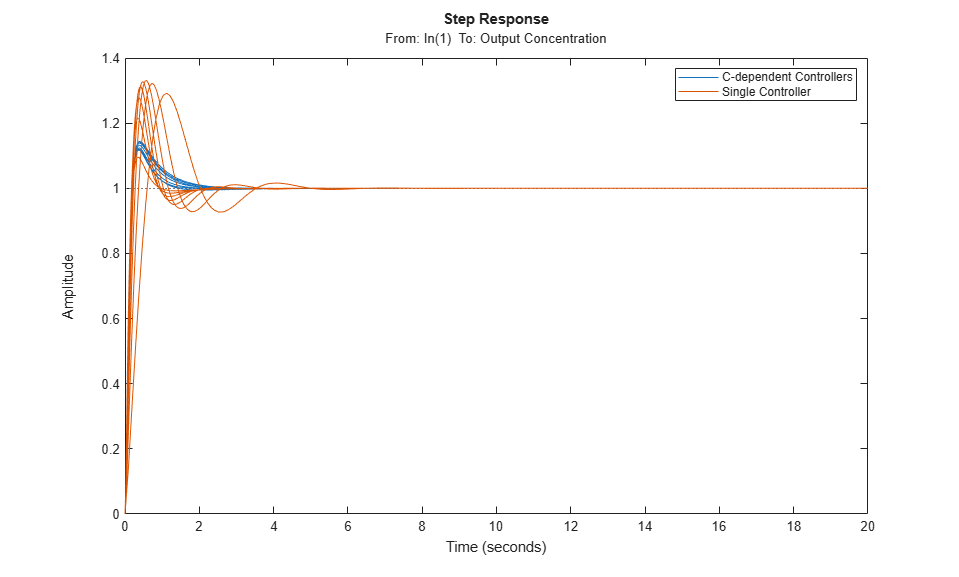
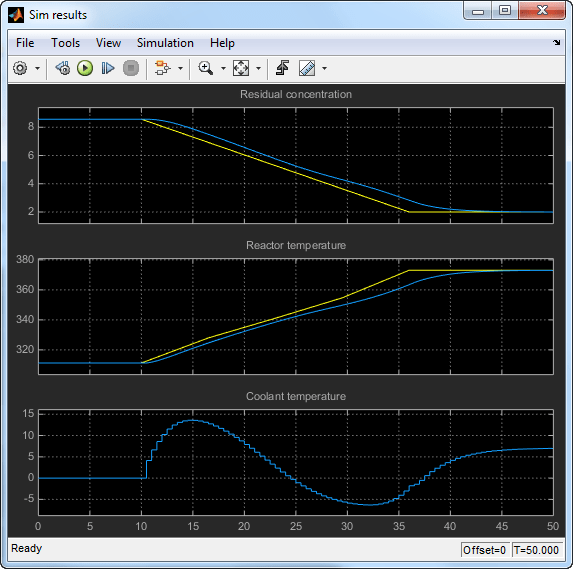
When tuning gain-scheduled controllers, you can specify tuning objectives that depend on the scheduling variables. - Validate Gain-Scheduled Control Systems
Tuning gain-scheduled controllers guarantees suitable performance only near each design point. It is important to validate the tuning results over the full range of operating conditions.
Étude de cas : Pilote automatique HL-20
- Trimming and Linearization of the HL-20 Airframe
Linearize an airframe model at an array of design points to use for gain-scheduled control design. - Angular Rate Control in the HL-20 Autopilot
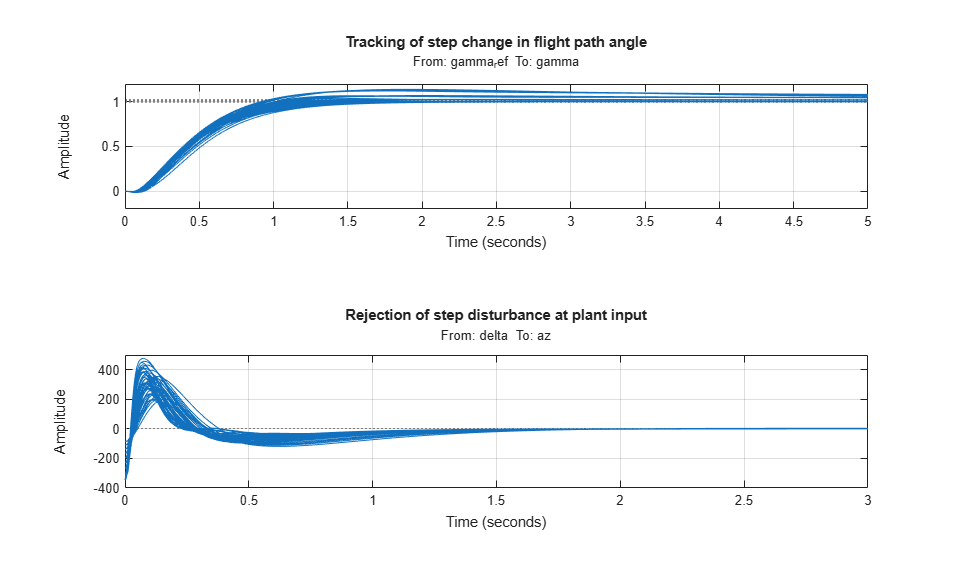
Tune gain-scheduled PI controllers for the inner loop of the HL-20 airframe model. - Attitude Control in the HL-20 Autopilot - SISO Design
Tune a gain-scheduled SISO architecture for controlling roll, pitch, and yaw of the airframe. - Attitude Control in the HL-20 Autopilot - MIMO Design
Tune a gain-scheduled MIMO architecture for controlling roll, pitch, and yaw of the airframe. - MATLAB Workflow for Tuning the HL-20 Autopilot
Design a gain-scheduled control system for the HL-20 airframe in MATLAB.
Exemples présentés
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)