Torque Converter
Viscous fluid coupling between rotating driveline shafts

Libraries:
Simscape /
Driveline /
Couplings & Drives
Description
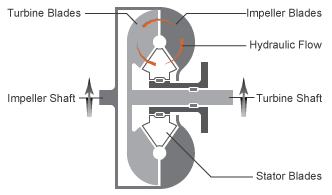
The Torque Converter block models a torque converter. The Torque Converter block has two mechanical rotational conserving ports that are associated with the impeller and turbine, respectively. The block transfers torque and angular velocity between the impeller port I and turbine port T by acting as a lookup table. The block can simulate drive (power flows from I port to T port) and coast (power flows from T port to I port) modes.
Examples



Limitations
When Coast mode modeling is set to
Continuous:
The impeller shaft must always rotate in a positive direction. Simulation is not valid for < 0.
If you drive the Torque Converter block by using a torque source, such as the Generic Engine block, you must include an inertia in the source to represent the engine, shaft inertia, or other source components. To ensure that the impeller starts by rotating in a positive direction, set the initial speed for this inertia to a positive value.
Ports
Conserving
Parameters
References
[1] Society of Automotive Engineers, Hydrodynamic Drive Test Code (Surface Vehicle Recommended Practice), SAE J643, Dec 2018.
Extended Capabilities
Version History
Introduced in R2011a
See Also
Simscape Blocks
Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)