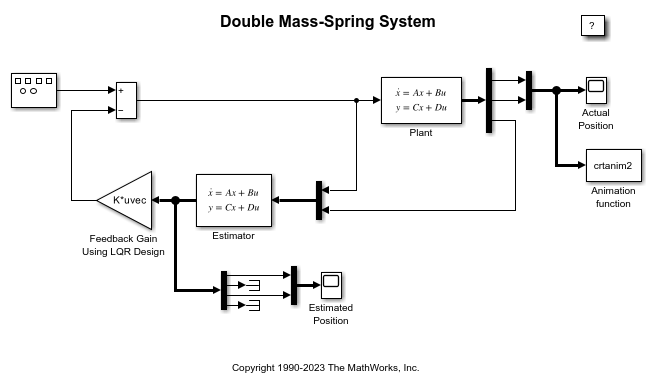
Double Spring Mass System
This example shows how to model a double spring-mass-damper system with a periodically varying forcing function. The model uses an S-Function block to animate the mass system during simulation. In the system, the only sensor is attached to the mass on the left, and the actuator is attached to the mass on the left. The example uses state estimation and linear-quadratic regulator (LQR) control.

See Also
Related Topics
- Design LQR Servo Controller in Simulink (Control System Toolbox)
- Double Mass-Spring-Damper in Simulink and Simscape (Simscape)
External Websites
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)