Model Predictive Control Toolbox
Concevoir et simuler des contrôleurs prédictifs
Vous avez des questions ? Contacter un commercial.
Vous avez des questions ? Contacter un commercial.
Model Predictive Control Toolbox offre des fonctions, une application, des blocs Simulink et des exemples de référence pour le développement de contrôleurs prédictifs (MPC). Pour les problèmes linéaires, la toolbox supporte le design de contrôleurs MPC implicites, explicites, adaptatifs et de type « séquencement de gain ». Pour les problèmes non linéaires, vous pouvez implémenter un contrôleur MPC non linéaire à simple ou multi-étages. La toolbox comprend des solveurs d'optimisation déployables et vous permet également d'utiliser un solveur personnalisé.
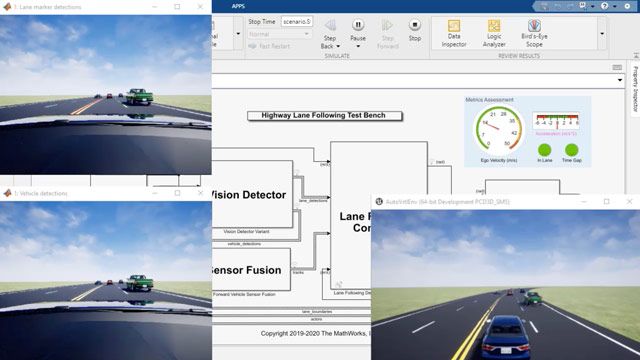
Vous pouvez évaluer les performances du contrôleur dans MATLAB et Simulink en exécutant des simulations en boucle fermée. Pour la conduite autonome, vous pouvez également utiliser les blocs et les exemples fournis, conformes aux normes MISRA C® et ISO 26262, afin de vous familiariser rapidement avec les applications d’aide au maintien de la trajectoire, de planification de trajectoire, de suivi de trajectoire et de régulation adaptative de la vitesse.
La toolbox supporte la génération de code C et CUDA® et la génération de texte structuré IEC 61131-3.

Concevez des contrôleurs MPC implicites, de type « séquencement de gain » et adaptatifs qui résolvent un problème de programmation quadratique (QP). Générez un contrôleur MPC explicite à partir d'un design implicite. Utilisez un MPC à variables de contrôle discrètes pour les problèmes de programmation quadratique en nombres entiers mixtes.

Utilisez l'application MPC Designer pour concevoir de manière interactive des contrôleurs MPC implicites, linéariser votre modèle Simulink avec Simulink Control Design, valider les performances du contrôleur à l'aide de scénarios de simulation et comparer les réponses de plusieurs designs.

Concevez des contrôleurs MPC non linéaires et économiques qui utilisent Optimization Toolbox pour résoudre un problème de programmation non linéaire (NLP). Utilisez une formulation à simple ou multi-étages pour la planification optimale et le système d'asservissement.

Accélérez le développement de systèmes de conduite autonome en utilisant des blocs Simulink prédéfinis conformes aux normes ISO 26262 et MISRA C. Les blocs prédéfinis supportent la planification et le suivi de trajectoire, la régulation adaptative de la vitesse et bien d'autres applications.

Choisissez parmi les solveurs QP prédéfinis, active-set, interior-point et mixed-integer, ou utilisez des solveurs NLP depuis Optimization Toolbox. Vous pouvez également utiliser les solveurs FORCESPRO (d’Embotech) ou votre propre solveur personnalisé.

Spécifiez des modèles de prédiction analytiquement avec Control System Toolbox ou Symbolic Math Toolbox, en linéarisant un modèle Simulink avec Simulink Control Design, ou par le biais de données mesurées avec System Identification Toolbox et Deep Learning Toolbox.

Estimez les états du contrôleur à partir des sorties mesurées avec l'estimateur d'états proposé dans la toolbox ou un estimateur d’états personnalisé. Détectez les problèmes potentiels de stabilité et de robustesse de votre design de contrôleur MPC linéaire avec la fonction de diagnostic prédéfinie.

Évaluez les performances de votre contrôleur en exécutant des simulations en boucle fermée dans Simulink avec des blocs Simulink conformes aux normes ISO 26262 et MISRA C, ainsi que dans MATLAB avec des fonctions en ligne de commande. Automatisez les tests pour plusieurs scénarios avec Simulink Test.

Générez automatiquement du code de production C/C++ et CUDA, ou du texte structuré IEC 61131-3, à partir de contrôleurs MPC conçus dans MATLAB et Simulink. Déployez le code vers une variété de cibles telles que des ECU, GPU et PLC.

« Sumitomo Construction Machinery a réduit de 15 % sa consommation de carburant sans réduire la performance dynamique de l'excavatrice. Ce meilleur rendement est en partie dû à une réduction de 50 % des fluctuations de vitesse du moteur obtenue grâce à Model Predictive Control Toolbox et au design amélioré du système de contrôle. »
Eisuke Matsuzaki, Sumitomo Heavy Industries
Profitez de 30 jours pour tester.
Comment pouvons-nous vous aider ?
Contactez l'équipe technique de Model Predictive Control Toolbox.
Vous pouvez également sélectionner un site web dans la liste suivante :
Amériques
Europe
Asie-Pacifique