Université Pierre et Marie Curie Students Model, Simulate, and Control Mechatronic Rehabilitation Systems
“By the end of the course, my students were able to use Simscape Multibody to design mechatronic systems without any help from me. They can now model any new system they imagine, and then run simulations to see if it performs correctly. They enjoyed using the tools, which led them to learn on their own.”
Challenge
Solution
Results
- Use of lab time optimized
- Student engagement increased
- Students empowered to explore designs on their own

Students enrolled in the Mechatronic Systems for Rehabilitation master’s program at Université Pierre et Marie Curie (UPMC) in Paris, now Sorbonne University, learn how to design mechatronic devices used for medical diagnosis, functional rehabilitation, and assistive technology. The program encompasses technological development and research across multiple disciplines, including mechanics, electronics, robotics, informatics, signal processing, image processing, and neurophysiology. It is the only university program of its kind in France.
In the course Simulation and Control of Mechatronic Systems for Rehabilitation, students use Simscape Multibody™ to model mechanical systems and then connect those models to control algorithms developed in Simulink®.
“When students only work with pen and paper, it is impossible for them to determine whether the systems they imagine function well,” says Viviane Pasqui, associate professor at UPMC. “With Simulink and Simscape Multibody they can see if their system operates as designed. As a result, students are more engaged and better prepared to design and develop real-world mechatronic systems.”
Challenge
Pasqui needed software that students could learn quickly as they progressed from simple exercises to developing controls for complex, real-world systems.
Solution
UPMC selected Simulink and Simscape Multibody to teach modeling, simulation, and control of mechatronic systems.
Simulation and Control of Mechatronic Systems for Rehabilitation includes weekly lectures, in which students learn the concepts needed to complete assignments, and four lab sessions.
While most students entered the course having used MATLAB® and Simulink in earlier control systems courses, none had used Simscape Multibody at university before. Pasqui set aside time in the first lab session for MathWorks engineers to demonstrate Simulink and Simscape Multibody and their use in various industries.
Pasqui provided step-by-step written instructions for the first lab, gradually reducing the level of detail as the students’ familiarity with Simscape Multibody increased.
In the second lab session, students worked independently, using Simulink and Simscape Multibody to model and simulate a simple pendulum and learning how to use and tune various solvers. The students experimented with different configurations by changing the pendulum’s physical properties, and simulated the effects of gravity and friction.
In the following lab, students learned about kinematic loops and inverse dynamics as they modeled and simulated a double pendulum in Simscape Multibody.
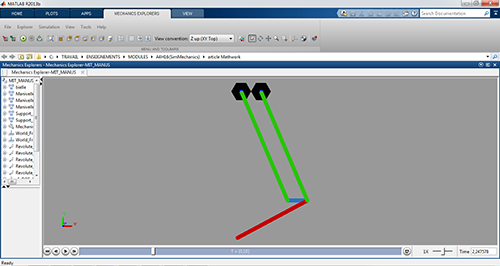
The final lab focused on MIT-Manus, a robot designed at MIT to help stroke victims recover use of their arms. Students started by writing the Lagrangian equations for the MIT-Manus system, which is based on a double pendulum.
Working in Simulink and Simscape Multibody, they modeled the MIT-Manus four-bar mechanism and ran simulations to visualize its behavior. They then developed a PID controller in Simulink, tuning the controller via closed-loop simulations until it accurately tracked and controlled the motion of the MIT-Manus mechanism.
When Pasqui teaches the course next year, she plans to add another lab session based on another real-world system. Given the positive feedback she has received, she expects a 50% increase in enrollment.
Results
Use of lab time optimized. “Simulink and Simscape Multibody enabled our students to model and simulate sophisticated systems during limited lab time,” says Pasqui. “With pure mechanical modeling software, students would have spent more time learning the software, leaving less time for practical work. With Simscape Multibody, students quickly get models running, allowing us to tackle more complex mechatronic systems.”
Student engagement increased. “For many students, purely academic lessons are boring,” says Pasqui. “With Simscape Multibody I can link theory to system behavior. When students see that the academic lesson is the first step toward practice, they are more interested and more engaged, which makes my job much easier.”
Students empowered to explore designs on their own. “Although my instructions gave specific dimensions for all components, the students wanted to try their own ideas with their own values,” notes Pasqui. “They learned a great deal from this exploration, and that was reflected in increased motivation in the labs and in the classroom.”