Generate Trajectory Live Editor Task for Flight Mission with No-Fly Zones
This example shows how to use the Generate Trajectory live task to create a trajectory for a flight mission with no-fly zones using waypoints.
Add Waypoints Using Generate Trajectory Live Task
On the Live Editor tab, select Insert > Task, and then select Generate Trajectory.
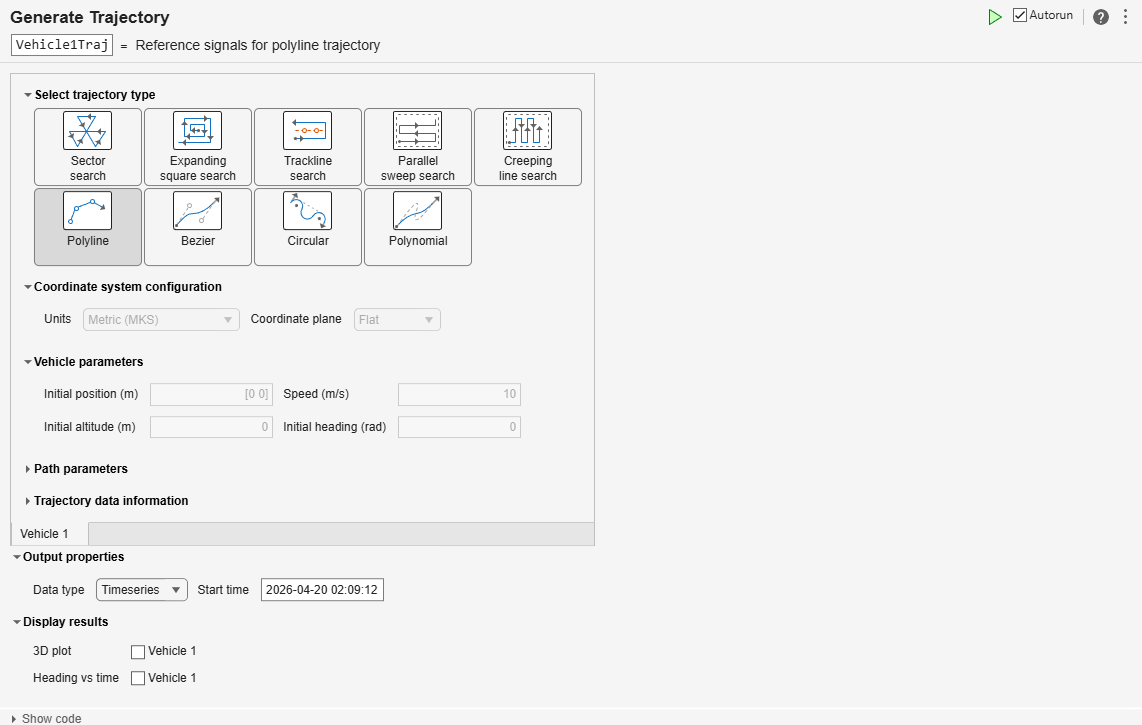
To see the generated code, select Show code.
Define No-Fly Zones
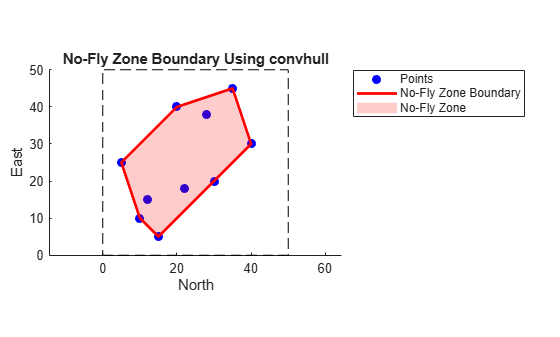
Define the bounding area for the no-fly zones. Use the convhull function to compute convex hull indices and then plot the area and fill in the no-fly zones.
Outline the perimeter of the no-fly zone.
xlim = [0 50]; ylim = [0 50];
Define a consistent set of boundary waypoints inside the boundary area.
x = [10 20 35 40 30 15 5 12 28 22]; y = [10 40 45 30 20 5 25 15 38 18];
Use the convhull function to compute the convex hull indices, and then plot the area and fill in the no-fly zones.
hullIdx = convhull(x, y); % Plot the square area figure; hold on; rectangle('Position',[xlim(1), ylim(1), xlim(2)-xlim(1), ylim(2)-ylim(1)], ... 'EdgeColor','k','LineStyle','--'); % Plot the points plot(x, y, 'bo', 'MarkerFaceColor', 'b'); % Plot the convex hull boundary plot(x(hullIdx), y(hullIdx), 'r-', 'LineWidth', 2);
Fill the no-fly zone, and then define the axis settings.
% Fill the no-fly zone fill(x(hullIdx), y(hullIdx), 'r', 'FaceAlpha', 0.2, 'EdgeColor', 'none'); % Axis settings axis([xlim ylim]); axis equal; title('No-Fly Zone Boundary Using convhull'); xlabel('North'); ylabel('East'); legend('Points','No-Fly Zone Boundary','No-Fly Zone', 'Location', 'bestoutside'); hold off;
Get Suitable Path Avoiding No-Fly Zones
Extract the trajectory data from the timeseries.
xTraj = Vehicle1Traj.xNorth.Data; yTraj = Vehicle1Traj.yEast.Data;
Prepare the convex hull polygon and then close the polygon.
xHull = x(hullIdx);
yHull = y(hullIdx); % closed polygon with repeated last pointFind the intersection points between the trajectory and the hull.
xIntersections = []; yIntersections = []; trajectorySegmentIndicesAtIntersection = []; hullSegmentIndicesAtIntersection = []; numTrajectorySegments = numel(xTraj) - 1; numHullSegments = numel(xHull) - 1; % assumes last point repeats first for trajectorySegmentIndex = 1:numTrajectorySegments for hullSegmentIndex = 1:numHullSegments % Trajectory segment endpoints xTrajectoryStart = xTraj(trajectorySegmentIndex); yTrajectoryStart = yTraj(trajectorySegmentIndex); xTrajectoryEnd = xTraj(trajectorySegmentIndex + 1); yTrajectoryEnd = yTraj(trajectorySegmentIndex + 1); % Hull segment endpoints xHullStart = xHull(hullSegmentIndex); yHullStart = yHull(hullSegmentIndex); xHullEnd = xHull(hullSegmentIndex + 1); yHullEnd = yHull(hullSegmentIndex + 1); % Segment intersection (parametric form) denominator = (xTrajectoryEnd - xTrajectoryStart) * (yHullEnd - yHullStart) ... - (yTrajectoryEnd - yTrajectoryStart) * (xHullEnd - xHullStart); if denominator == 0 continue; % Parallel segments, no intersection end % Parameters along trajectory (uTraj) and hull (uHull) segments uTraj = ((xHullEnd - xHullStart) * (yTrajectoryStart - yHullStart) ... - (yHullEnd - yHullStart) * (xTrajectoryStart - xHullStart)) / denominator; uHull = ((xTrajectoryEnd - xTrajectoryStart) * (yTrajectoryStart - yHullStart) ... - (yTrajectoryEnd - yTrajectoryStart) * (xTrajectoryStart - xHullStart)) / denominator; % Check if intersection lies within both segments if uTraj >= 0 && uTraj <= 1 && uHull >= 0 && uHull <= 1 xIntersections(end+1,1) = xTrajectoryStart + uTraj * (xTrajectoryEnd - xTrajectoryStart); yIntersections(end+1,1) = yTrajectoryStart + uTraj * (yTrajectoryEnd - yTrajectoryStart); trajectorySegmentIndicesAtIntersection(end+1,1) = trajectorySegmentIndex; hullSegmentIndicesAtIntersection(end+1,1) = hullSegmentIndex; end end end
Remove duplicate intersection points (with tolerance).
if ~isempty(xIntersections) tolerance = 1e-8; intersectionCoordinates = [xIntersections yIntersections]; intersectionRounded = round(intersectionCoordinates / tolerance) * tolerance; [~, uniqueIndices] = unique(intersectionRounded, 'rows', 'stable'); xIntersections = xIntersections(uniqueIndices); yIntersections = yIntersections(uniqueIndices); trajectorySegmentIndicesAtIntersection = trajectorySegmentIndicesAtIntersection(uniqueIndices); hullSegmentIndicesAtIntersection = hullSegmentIndicesAtIntersection(uniqueIndices); else legend('Area Boundary', 'Points', 'No-Fly Zone Boundary', 'No-Fly Zone', 'Vehicle 1 Trajectory'); disp('No intersection between trajectory and NFZ.'); return end
Find the closest vertex indices on trajectory and hull for each intersection.
closestTrajectoryPointIndices = zeros(size(xIntersections)); closestHullPointIndices = zeros(size(xIntersections)); for intersectionIndex = 1:length(xIntersections) [~, closestTrajectoryPointIndices(intersectionIndex)] = min(hypot(xTraj - xIntersections(intersectionIndex), yTraj - yIntersections(intersectionIndex))); [~, closestHullPointIndices(intersectionIndex)] = min(hypot(xHull - xIntersections(intersectionIndex), yHull - yIntersections(intersectionIndex))); end
Sort the intersections in order along trajectory.
[~, sortOrder] = sort(closestTrajectoryPointIndices); xIntersections = xIntersections(sortOrder); yIntersections = yIntersections(sortOrder); closestTrajectoryPointIndices = closestTrajectoryPointIndices(sortOrder); closestHullPointIndices = closestHullPointIndices(sortOrder);
Handle the first entry and first exit.
if length(xIntersections) < 2 legend('Area Boundary', 'Points', 'No-Fly Zone Boundary', 'No-Fly Zone', 'Vehicle 1 Trajectory'); disp('Trajectory crosses NFZ less than twice. No rerouting performed.'); return end entryTrajectoryIndex = closestTrajectoryPointIndices(1); exitTrajectoryIndex = closestTrajectoryPointIndices(2); entryHullIndex = closestHullPointIndices(1); exitHullIndex = closestHullPointIndices(2);
Find the shortest path along the hull between entry and exit in both directions.
numHullVertices = length(xHull); if exitHullIndex > entryHullIndex hullPathForward = entryHullIndex:exitHullIndex; hullPathBackward = [exitHullIndex:numHullVertices, 1:entryHullIndex]; else hullPathForward = [entryHullIndex:numHullVertices, 1:exitHullIndex]; hullPathBackward = exitHullIndex:entryHullIndex; end if length(hullPathForward) < length(hullPathBackward) hullPathIndices = hullPathForward; else hullPathIndices = hullPathBackward; end
Build a new rerouted polyline from the entry to the exit via the hull perimeter.
xRerouted = [xTraj(1:entryTrajectoryIndex); xHull(hullPathIndices)'; xIntersections(2); xTraj(exitTrajectoryIndex+1:end)]; yRerouted = [yTraj(1:entryTrajectoryIndex); yHull(hullPathIndices)'; yIntersections(2); yTraj(exitTrajectoryIndex+1:end)];
Convert the rerouted polyline to segments, distances, bearings, and altitudes.
deltaX = diff(xRerouted); deltaY = diff(yRerouted); segmentDistances = hypot(deltaX, deltaY); segmentAbsoluteBearings = mod(atan2(deltaY, deltaX), 2*pi); segmentAltitudes = zeros(1, numel(segmentDistances));
Create an aerospace polyline trajectory with timeseries output.
reroutedTrajectory = Aero.trajectory.polylineTrajectory( ... CoordinatePlane = "Flat", ... InitialPosition = [xRerouted(1), yRerouted(1)], ... Speed = 10, ... InitialHeading = segmentAbsoluteBearings(1), ... InitialAltitude = 0, ... OutputFormat = "timeseries", ... Units = "Metric (MKS)", ... StartTime = "2025-10-12 11:20:02", ... SegmentDistance = segmentDistances(1), ... AbsoluteBearing = segmentAbsoluteBearings(1), ... Altitude = segmentAltitudes(1)); for segmentIndex = 2:numel(segmentDistances) reroutedTrajectory = Aero.trajectory.polylineTrajectory( ... PriorTrajectory = reroutedTrajectory, ... SegmentDistance = segmentDistances(segmentIndex), ... AbsoluteBearing = segmentAbsoluteBearings(segmentIndex), ... Altitude = segmentAltitudes(segmentIndex)); end xReroutedTrajectory = reroutedTrajectory.xNorth.Data; yReroutedTrajectory = reroutedTrajectory.yEast.Data;
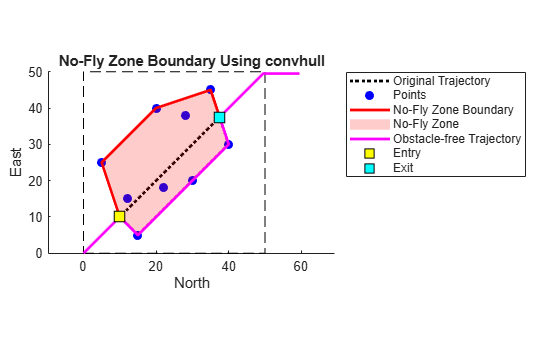
Plot Trajectory
Plot the original trajectory as a dotted black line.
figure; hold on; plot(xTraj, yTraj, 'k:', 'LineWidth', 2); % Dotted black line % Draw the plotting window rectangle (based on current axis limits) rectangle('Position', [xlim(1), ylim(1), xlim(2)-xlim(1), ylim(2)-ylim(1)], ... 'EdgeColor', 'k', 'LineStyle', '--'); % Plot the input points plot(x, y, 'bo', 'MarkerFaceColor', 'b'); % Plot the convex hull boundary plot(x(hullIdx), y(hullIdx), 'r-', 'LineWidth', 2); % Fill the no-fly zone fill(x(hullIdx), y(hullIdx), 'r', 'FaceAlpha', 0.2, 'EdgeColor', 'none'); % Axis settings axis([xlim ylim]); axis equal; title('No-Fly Zone Boundary Using convhull'); xlabel('North'); ylabel('East'); % Plot rerouted trajectory and intersection points plot(xReroutedTrajectory, yReroutedTrajectory, 'm-', 'LineWidth', 2); plot(xIntersections(1), yIntersections(1), 'ks', 'MarkerFaceColor', 'y', 'MarkerSize', 10); % Entry plot(xIntersections(2), yIntersections(2), 'ks', 'MarkerFaceColor', 'c', 'MarkerSize', 10); % Exit legend('Original Trajectory', 'Points', 'No-Fly Zone Boundary', 'No-Fly Zone', ... 'Obstacle-free Trajectory', 'Entry', 'Exit', 'Location', 'bestoutside'); hold off;
clearvars -except Vehicle1Traj reroutedTrajectory