La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
rlocus
Tracé des lieux des racines d’un système dynamique
Description
rlocus( calcule et trace le lieu des racines du modèle SISO sys)sys. Le lieu des racines renvoie les trajectoires des pôles en boucle fermée en tant que fonction du gain de rétroaction k (dans le cas d’une rétroaction négative). Les lieux des racines permettent d’étudier les effets des gains de rétroaction variables des emplacements de pôles en boucle fermée. À leur tour, ces emplacements fournissent des informations indirectes sur les réponses temporelles et fréquentielles.
Vous pouvez utiliser rlocus pour tracer le diagramme des lieux des racines de n’importe laquelle des boucles de rétroaction négative suivantes en définissant sys comme indiqué ci-dessous :

Par exemple, si sys est une fonction de transfert représentée par
les pôles en boucle fermée sont les racines de
Le tracé des lieux des racines représente les trajectoires des pôles en boucle fermée lorsque le gain de rétroaction k varie de 0 à l’infini. rlocus sélectionne de manière adaptative un ensemble de gains positifs k pour obtenir un tracé lisse. Les pôles du tracé des lieux des racines sont désignés par x et les zéros sont désignés par o.
rlocus(sys1,sys2,...) effectue un tracé unique regroupant les lieux des racines de plusieurs modèles LTI sys1, sys2,.... Vous pouvez définir une couleur, un style de trait et un marqueur pour chaque modèle. Pour découvrir d’autres options de personnalisation du tracé, voir rlocusplot.
Exemples
Tracé des lieux des racines d’un système dynamique
Pour cet exemple, tracez le lieu des racines du système dynamique SISO suivant :
sys = tf([2 5 1],[1 2 3]); rlocus(sys)

Les pôles du système sont désignés par x, tandis que les zéros sont désignés par o sur le tracé des lieux des racines. Vous pouvez utiliser le menu du tracé des lieux des racines généré pour ajouter des lignes de grille, effectuer un zoom avant ou arrière et également lancer le Property Editor afin de personnaliser le tracé.
Pour découvrir d’autres options de personnalisation du tracé, utilisez rlocusplot.
Tracé des lieux des racines de plusieurs modèles de systèmes dynamiques
Pour cet exemple, examinez sisoModels.mat qui contient les trois modèles SISO suivants :
sys1Un modèle de fonction de transfertsys2Un modèle de représentation d'étatsys3Un modèle zéro-pôle-gain
Chargez les modèles à partir du fichier mat.
load('sisoModels.mat','sys1','sys2','sys3');
Créez le tracé des lieux des racines au moyen de rlocus et spécifiez la couleur de chaque système. Ajoutez également une légende au tracé des lieux des racines.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off
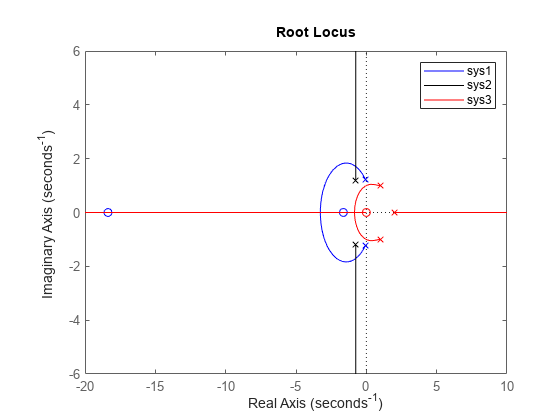
La figure contient les diagrammes des lieux des racines des trois systèmes du tracé unique. Pour découvrir d’autres options de personnalisation du tracé, voir rlocusplot.
Pôles en boucle fermée et valeurs de gain de rétroaction au moyen du lieu des racines
Pour cet exemple, considérons le modèle de fonction de transfert SISO suivant :
Utilisez le modèle de fonction de transfert ci-dessus avec rlocus pour extraire les pôles en boucle fermée et les valeurs de gain de rétroaction qui leur sont associées.
sys = tf([3 0 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
102 ×
-0.0094 + 0.0000i -0.0104 + 0.0000i -0.0105 + 0.0000i -0.0106 + 0.0000i -0.0107 + 0.0000i -0.0108 + 0.0000i -0.0109 + 0.0000i -0.0111 + 0.0000i -0.0112 + 0.0000i -0.0113 + 0.0000i -0.0115 + 0.0000i -0.0117 + 0.0000i -0.0119 + 0.0000i -0.0121 + 0.0000i -0.0124 + 0.0000i -0.0126 + 0.0000i -0.0129 + 0.0000i -0.0132 + 0.0000i -0.0135 + 0.0000i -0.0139 + 0.0000i -0.0143 + 0.0000i -0.0148 + 0.0000i -0.0152 + 0.0000i -0.0158 + 0.0000i -0.0163 + 0.0000i -0.0170 + 0.0000i -0.0177 + 0.0000i -0.0184 + 0.0000i -0.0192 + 0.0000i -0.0201 + 0.0000i -0.0211 + 0.0000i -0.0222 + 0.0000i -0.0233 + 0.0000i -0.0246 + 0.0000i -0.0259 + 0.0000i -0.0274 + 0.0000i -0.0290 + 0.0000i -0.0307 + 0.0000i -0.0326 + 0.0000i -0.0346 + 0.0000i -0.0368 + 0.0000i -0.0392 + 0.0000i -0.0418 + 0.0000i -0.0446 + 0.0000i -0.0476 + 0.0000i -0.0508 + 0.0000i -0.0543 + 0.0000i -0.0582 + 0.0000i -0.0623 + 0.0000i -0.0667 + 0.0000i
0.0008 + 0.0084i 0.0006 + 0.0083i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0081i 0.0005 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0080i 0.0004 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0079i 0.0002 + 0.0079i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0001 + 0.0077i 0.0001 + 0.0077i 0.0001 + 0.0076i 0.0000 + 0.0076i 0.0000 + 0.0075i -0.0000 + 0.0074i -0.0000 + 0.0074i -0.0000 + 0.0073i -0.0001 + 0.0073i -0.0001 + 0.0072i -0.0001 + 0.0071i -0.0001 + 0.0071i -0.0001 + 0.0070i -0.0001 + 0.0070i -0.0001 + 0.0069i -0.0001 + 0.0068i -0.0001 + 0.0068i -0.0001 + 0.0067i -0.0001 + 0.0067i -0.0001 + 0.0066i -0.0001 + 0.0066i -0.0001 + 0.0065i -0.0001 + 0.0065i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0063i -0.0001 + 0.0063i
0.0008 - 0.0084i 0.0006 - 0.0083i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0081i 0.0005 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0080i 0.0004 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0079i 0.0002 - 0.0079i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0001 - 0.0077i 0.0001 - 0.0077i 0.0001 - 0.0076i 0.0000 - 0.0076i 0.0000 - 0.0075i -0.0000 - 0.0074i -0.0000 - 0.0074i -0.0000 - 0.0073i -0.0001 - 0.0073i -0.0001 - 0.0072i -0.0001 - 0.0071i -0.0001 - 0.0071i -0.0001 - 0.0070i -0.0001 - 0.0070i -0.0001 - 0.0069i -0.0001 - 0.0068i -0.0001 - 0.0068i -0.0001 - 0.0067i -0.0001 - 0.0067i -0.0001 - 0.0066i -0.0001 - 0.0066i -0.0001 - 0.0065i -0.0001 - 0.0065i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0063i -0.0001 - 0.0063i
k = 1×53
0 0.4201 0.4542 0.4911 0.5309 0.5740 0.6205 0.6709 0.7253 0.7841 0.8477 0.9165 0.9908 1.0712 1.1581 1.2521 1.3536 1.4634 1.5822 1.7105 1.8493 1.9993 2.1614 2.3368 2.5263 2.7313 2.9529 3.1924 3.4514 3.7313 4.0340 4.3613 4.7151 5.0975 5.5111 5.9581 6.4415 6.9640 7.5289 8.1397 8.8000 9.5138 10.2856 11.1200 12.0220 12.9973 14.0516 15.1915 16.4238 17.7561
Étant donné que sys contient 3 pôles, la taille du tableau de pôles r obtenu est de 3x53. Chaque colonne de r correspond à une valeur de gain issue du vecteur k. Pour cet exemple, rlocus choisit automatiquement 53 valeurs de k de zéro à l'infini afin d’obtenir une trajectoire lisse pour les trois pôles en boucle fermée.
display(r(:,39))
-3.2585 + 0.0000i -0.0145 + 0.6791i -0.0145 - 0.6791i
display(k(39))
7.5289
Par exemple, r(:,39) contient les pôles en boucle fermée ci-dessus pour une valeur de gain de rétroaction de 7.5289.
Emplacements des pôles en boucle fermée pour un ensemble de valeurs de gain de rétroaction
Pour cet exemple, considérons le modèle de fonction de transfert SISO suivant :
Définissez le modèle de fonction de transfert et le vecteur de valeurs de gain de rétroaction nécessaire. Pour cet exemple, considérons un ensemble de valeurs de gain allant de 1 à 8 par incréments de 0,5, et extrayons les emplacements des pôles en boucle fermée au moyen de rlocus.
sys = tf([0.5 0 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
Étant donné que sys contient 4 pôles en boucle fermée, la taille du tableau des emplacements de pôles en boucle fermée r obtenu est de 4 x 9 où les 9 colonnes correspondent aux 9 valeurs de gain spécifiques définies dans k.
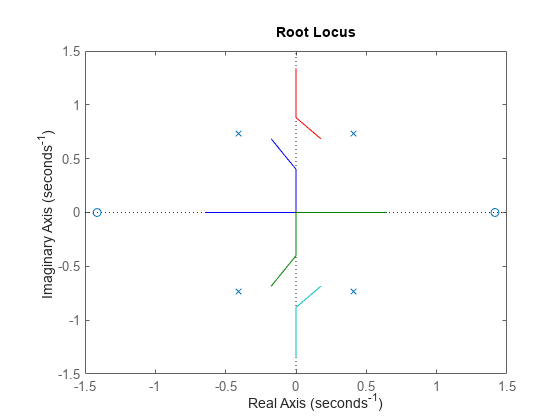
Vous pouvez également visualiser la trajectoire des pôles en boucle fermée pour les valeurs de gain spécifiques dans k sur le tracé des lieux des racines.
rlocus(sys,k)
Arguments d'entrée
Arguments en sortie
Conseils
Pour découvrir une approche interactive des tracés des lieux des racines, voir Control System Designer.
Historique des versions
Introduit avant R2006a
Voir aussi
rlocusplot | tf | pole | zero | ss | zpk | Control System Designer
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)