Train DDPG Agent for Adaptive Cruise Control
This example shows how to train a deep deterministic policy gradient (DDPG) agent for adaptive cruise control (ACC) in Simulink®. For more information on DDPG agents, see Deep Deterministic Policy Gradient (DDPG) Agent (Reinforcement Learning Toolbox).
Fix Random Seed Generator to Improve Reproducibility
The example code may involve computation of random numbers at various stages such as initialization of the agent, creation of the actor and critic, resetting the environment during simulations, generating observations (for stochastic environments), generating exploration actions, and sampling min-batches of experiences for learning. Fixing the random number stream preserves the sequence of the random numbers every time you run the code and improves reproducibility of results. You will fix the random number stream at various locations in the example.
Fix the random number stream with the seed 0 and random number algorithm Mersenne Twister. For more information on random number generation see rng.
previousRngState = rng(0,"twister")previousRngState = struct with fields:
Type: 'twister'
Seed: 0
State: [625x1 uint32]
The output previousRngState is a structure that contains information about the previous state of the stream. You will restore the state at the end of the example.
Adaptive Cruise Control Simulink Model
The reinforcement learning environment for this example is the simple longitudinal dynamics for an ego car and lead car. The training goal is to make the ego car travel at a set velocity while maintaining a safe distance from lead car by controlling longitudinal acceleration and braking. This example uses the same vehicle model as the Adaptive Cruise Control System Using Model Predictive Control (Model Predictive Control Toolbox) example.
Specify the initial position and velocity for the two vehicles.
x0_lead = 50; % initial position for lead car (m) v0_lead = 25; % initial velocity for lead car (m/s) x0_ego = 10; % initial position for ego car (m) v0_ego = 20; % initial velocity for ego car (m/s)
Specify standstill default spacing (m), time gap (s) and driver-set velocity (m/s).
D_default = 10; t_gap = 1.4; v_set = 30;
To simulate the physical limitations of the vehicle dynamics, constraint the acceleration to the range [–3,2] m/s^2.
amin_ego = -3; amax_ego = 2;
Define the sample time Ts and simulation duration Tf in seconds.
Ts = 0.1; Tf = 60;
Open the model.
mdl = "rlACCMdl"; open_system(mdl) agentblk = mdl + "/RL Agent";
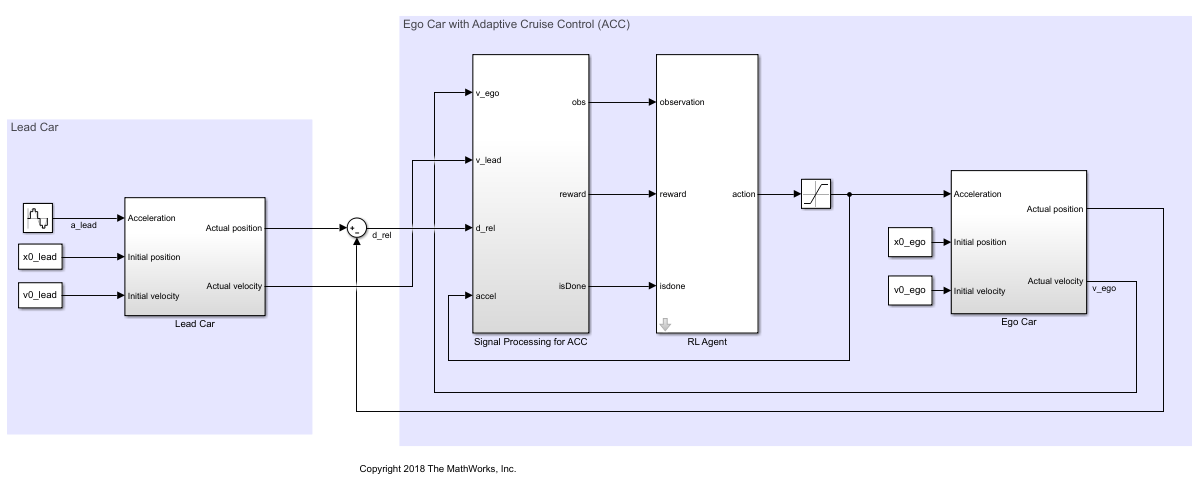
For this model:
The acceleration action signal from the agent to the environment is from –3 to 2 m/s^2.
The reference velocity for the ego car is defined as follows. If the relative distance is less than the safe distance, the ego car tracks the minimum of the lead car velocity and driver-set velocity. In this manner, the ego car maintains some distance from the lead car. If the relative distance is greater than the safe distance, the ego car tracks the driver-set velocity. In this example, the safe distance is defined as a linear function of the ego car longitudinal velocity ; that is, . The safe distance determines the reference tracking velocity for the ego car.
The observations from the environment are the velocity error , its integral , and the ego car longitudinal velocity .
The simulation is terminated when longitudinal velocity of the ego car is less than 0, or the relative distance between the lead car and ego car becomes less than 0.
The reward , provided at every time step , is
where is the control input from the previous time step. The logical value if velocity error ; otherwise, .
Create Environment Object
Create a reinforcement learning environment interface for the model.
Create the observation specification.
obsInfo = rlNumericSpec([3 1], ... LowerLimit=-inf*ones(3,1), ... UpperLimit=inf*ones(3,1)); obsInfo.Name = "observations"; obsInfo.Description = "velocity error and ego velocity";
Create the action specification.
actInfo = rlNumericSpec([1 1], ... LowerLimit=-3,UpperLimit=2); actInfo.Name = "acceleration";
Create the environment interface.
env = rlSimulinkEnv(mdl,agentblk,obsInfo,actInfo);
To define the initial condition for the position of the lead car, specify the reset function localResetFcn, which is defined at the end of the example.
env.ResetFcn = @localResetFcn;
Create Default DDPG Agent
You will create and train a DDPG agent in this example. The agent uses:
A Q-value function critic to estimate the value of the policy. The critic takes the current observation and an action as inputs and returns a single scalar as output (the estimated discounted cumulative long-term reward given the action from the state corresponding to the current observation, and following the policy thereafter).
A deterministic policy over a continuous action space, which is learned by a continuous deterministic actor. This actor takes the current observation as input and returns as output an action that is a deterministic function of the observation.
The actor and critic functions are approximated using neural network representations. Create an agent initialization object to initialize the networks with the hidden layer size 200.
initOpts = rlAgentInitializationOptions(NumHiddenUnit=200);
Configure the hyperparameters for training using rlDDPGAgentOptions (Reinforcement Learning Toolbox).
Specify a mini-batch size of
50. Smaller mini-batches are computationally efficient but may introduce variance in training. By contrast, larger batch sizes can make the training stable but require higher memory.Specify the actor and critic learning rates as 3e-4 and 1e-2. A large learning rate causes drastic updates which may lead to divergent behaviors, while a low value may require many updates before reaching the optimal point.
Specify the sample time as
Ts.
Specify the actor and critic optimizer options.
actorOptions = rlOptimizerOptions( ... LearnRate = 3e-4, ... GradientThreshold = 1, ... L2RegularizationFactor = 1e-4); criticOptions = rlOptimizerOptions( ... LearnRate = 1e-2, ... GradientThreshold = 1, ... L2RegularizationFactor = 1e-4);
Create the agent options object. For more information see rlDDPGAgentOptions (Reinforcement Learning Toolbox).
agentOptions = rlDDPGAgentOptions(... SampleTime = Ts,... MiniBatchSize = 50,... ActorOptimizerOptions = actorOptions,... CriticOptimizerOptions = criticOptions,... ExperienceBufferLength = 1e6);
The DDPG agent in this example uses an Ornstein-Uhlenbeck (OU) noise model for exploration. For the noise model:
Specify a mean attraction value of 0.7. A larger mean attraction value keeps the noise values close to the mean.
Specify a standard deviation value of 0.4 to improve exploration during training.
Specify a decay rate of 1e-5 for the standard deviation. The decay causes exploration to reduce gradually as the training progresses.
agentOptions.NoiseOptions.MeanAttractionConstant = 0.7; agentOptions.NoiseOptions.StandardDeviation = 0.4; agentOptions.NoiseOptions.StandardDeviationDecayRate = 1e-5;
Create the DDPG agent using the observation and action input specifications, initialization options and agent options. When you create the agent, the initial parameters of the actor and critic networks are initialized with random values. Fix the random number stream so that the agent is always initialized with the same parameter values.
rng(0,"twister");
agent = rlDDPGAgent(obsInfo,actInfo,initOpts,agentOptions);For more information, see rlDDPGAgent (Reinforcement Learning Toolbox).
Train Agent
To train the agent, first specify the training options. For this example, use the following options:
Run the training episode for 500 episodes, with each episode lasting at most
maxstepstime steps.Display the training progress in the Reinforcement Learning Training Monitor window.
For more information, see rlTrainingOptions (Reinforcement Learning Toolbox).
maxepisodes = 500; maxsteps = ceil(Tf/Ts); trainingOpts = rlTrainingOptions(... MaxEpisodes = maxepisodes,... MaxStepsPerEpisode = maxsteps,... Plots = "training-progress",... StopTrainingCriteria = "none");
Fix the random stream for reproducibility.
rng(0,"twister");Train the agent using the train (Reinforcement Learning Toolbox) function. Training is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % Train the agent. trainResult = train(agent,env,trainingOpts); else % Load a pretrained agent for the example. load("SimulinkACCDDPG.mat","agent") end
An example of the training is shown below. The actual results may vary because of randomness in the training process.

Simulate Agent
Fix the random stream for reproducibility.
rng(0,"twister");To validate the performance of the trained agent deterministically, set the initial position of the lead car to 80 (m) and simulate the model. To validate the performance for a randomly chosen initial position, set useRandomInitialConditions to true.
useRandomInitialConditions =false; if useRandomInitialConditions x0_lead = 80; sim(mdl); else simOptions = rlSimulationOptions(MaxSteps=maxsteps); experience = sim(env,agent,simOptions); end
For more information on agent simulation, see rlSimulationOptions (Reinforcement Learning Toolbox) and sim (Reinforcement Learning Toolbox).
The following plots show deterministic simulation results when lead car is initially 80 (m) ahead of the ego car.
In the first 30 seconds, the relative distance is greater than the safe distance (bottom plot), so the ego car tracks the set velocity (middle plot). To speed up and reach the set velocity, acceleration is initially positive (top plot).
At approximately 8 seconds, the ego car is able to track the set velocity and acceleration is reduced to zero.
After 30 seconds, the relative distance is less than the safe distance (bottom plot), so the ego car tracks the minimum of the lead velocity and set velocity. To slow down and track the lead car velocity, the acceleration turns negative (top plot).
Throughout the simulation the ego car adjusts its acceleration to keep on tracking either the minimum between the lead velocity and the set velocity, or the set velocity, depending on whether the relative distance is deemed to be safe or not.



Restore the random number stream using the information stored in previousRngState.
rng(previousRngState);
Reset Function
function in = localResetFcn(in) % Reset the initial position of the lead car. in = setVariable(in,"x0_lead",40+randi(60,1,1)); end
See Also
train (Reinforcement Learning Toolbox)
Related Topics
- Train Reinforcement Learning Agents (Reinforcement Learning Toolbox)
- Create Policies and Value Functions (Reinforcement Learning Toolbox)
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)