Localisation et estimation de la pose
Utilisez des algorithmes de localisation et d’estimation de pose pour orienter votre véhicule dans votre environnement. La fusion de capteurs inertiels utilise des filtres pour améliorer et combiner les lectures des capteurs pour l'IMU, le GPS et autres. Les algorithmes de localisation, comme la localisation Monte Carlo et la correspondance par balayage, estiment votre pose sur une carte connue à l'aide d'un capteur de distance ou de lectures lidar. Les graphiques de pose suivent vos poses estimées et peuvent être optimisés en fonction des contraintes de bord et des fermetures de boucles.
Pour modéliser des capteurs spécifiques, voir Modèles de capteurs.
Pour la localisation et le mappage simultanés, voir CLAQUER.
Catégories
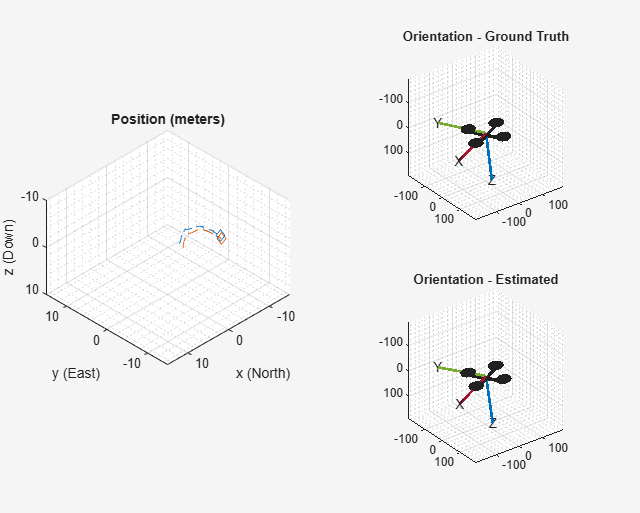
- Fusion de capteurs inertiels
Navigation inertielle avec IMU et GPS, fusion de capteurs, réglage de filtre personnalisé
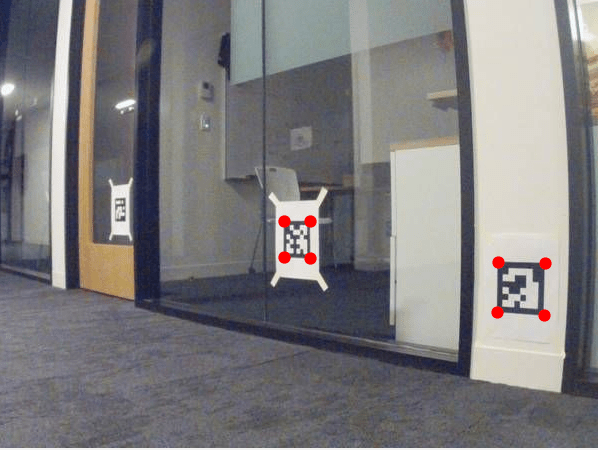
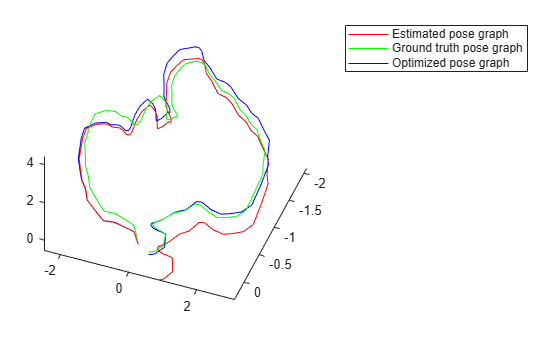
- Algorithmes de localisation
Filtres à particules, scan matching, localisation Monte Carlo, graphiques de pose, odométrie
Exemples présentés


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)