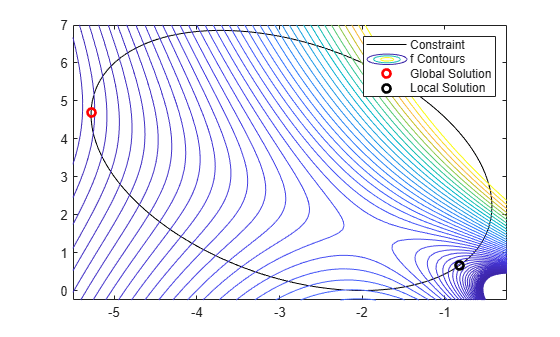
Nonlinear Optimization
Solve constrained or unconstrained nonlinear problems
with one or more objectives, in serial or parallel
To set up a nonlinear optimization problem for solution, first decide between a problem-based approach and solver-based approach. See First Choose Problem-Based or Solver-Based Approach.
For problem-based nonlinear examples and theory, see Problem-Based Nonlinear Optimization.
For solver-based nonlinear examples and theory, see Solver-Based Nonlinear Optimization.
For optimizing multiple objective functions, see Multiobjective Optimization.
Categories
- Problem-Based Nonlinear Optimization
Solve nonlinear optimization problems in serial or parallel using the problem-based approach
- Solver-Based Nonlinear Optimization
Solve nonlinear minimization and semi-infinite programming problems in serial or parallel using the solver-based approach
- Multiobjective Optimization
Solve multiobjective optimization problems in serial or parallel
Featured Examples

You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)