step
System object: phased.TimeDelayBeamformer
Namespace: phased
Perform time delay beamforming
Syntax
Y = step(H,X)
Y = step(H,X,ANG)
[Y,W] = step(___)
Description
Note
Starting in R2016b, instead of using the step method
to perform the operation defined by the System object™, you can
call the object with arguments, as if it were a function. For example, y
= step(obj,x) and y = obj(x) perform
equivalent operations.
Y = step(H,X) performs time delay beamforming
on the input, X, and returns the beamformed output
in Y. X is an M-by-N matrix
where N is the number of elements of the sensor array. Y is
a column vector of length M.
The size of the first dimension of the input matrix can vary to simulate a changing signal length. A size change can occur, for example, in the case of a pulse waveform with variable pulse repetition frequency.
Y = step(H,X,ANG) uses ANG as
the beamforming direction. This syntax is available when you set the DirectionSource property
to'Input port'. ANG is a column
vector of length 2 in the form of [AzimuthAngle; ElevationAngle] (in
degrees). The azimuth angle must be between –180 and 180 degrees,
and the elevation angle must be between –90 and 90 degrees.
[Y,W] = step(___) returns additional
output, W, as the beamforming weights. This syntax
is available when you set the WeightsOutputPort property
to true. W is a column vector
of length N. For a time delay beamformer, the weights are constant
because the beamformer simply adds all the channels together and scales
the result to preserve the signal power.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
All input and output arguments can be single or double precision.
Examples
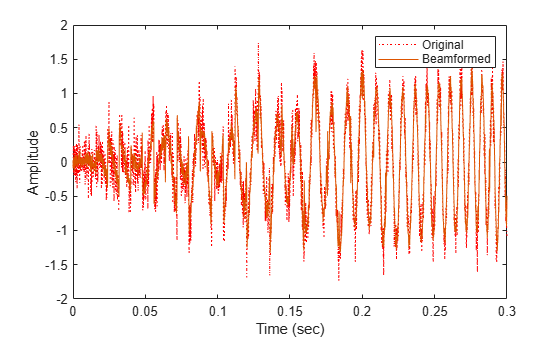
Apply a time-delay beamformer to an 11-element uniform linear acoustic array. The arrival angle of the signal is -50 degrees in azimuth and 30 degrees in elevation. The arriving signal is a 0.3 second segment of a linear FM chirp having a 500 Hz bandwidth. Assume the speed of sound in air is 340.0 m/s.
Simulate the arriving signal at the wideband collector.
microphone = phased.CustomMicrophoneElement(FrequencyVector=[20,20000],FrequencyResponse=[1,1]);
array = phased.ULA(Element=microphone,NumElements=11,ElementSpacing=0.04);
fs = 8000;
t = 0:1/fs:0.3;
x = chirp(t,0,1,500);
c = 340;
collector = phased.WidebandCollector(Sensor=array,...
PropagationSpeed=c,SampleRate=fs,ModulatedInput=false);
incidentAngle = [-50;30];
x = collector(x.',incidentAngle);Add white Gaussian random noise to the signal.
sigma = 0.2; noise = sigma*randn(size(x)); rx = x + noise;
Beamform the incident signals using a time-delay beamformer.
beamformer = phased.TimeDelayBeamformer(SensorArray=array,... SampleRate=fs,PropagationSpeed=c,... Direction=incidentAngle); y = beamformer(rx);
Plot the beamformed signal against the incident signal at the middle sensor of the array.
plot(t,rx(:,6),"r:",t,y) xlabel("Time (sec)") ylabel("Amplitude") legend("Original","Beamformed")