Simulate and Generate Structured Text Code for Rockwell Automation Motion Instructions
This example shows how to model Rockwell Automation® motion instructions in Stateflow®. Generate structured text code for the modeled motion instructions by using Simulink® PLC Coder™.
Model Description
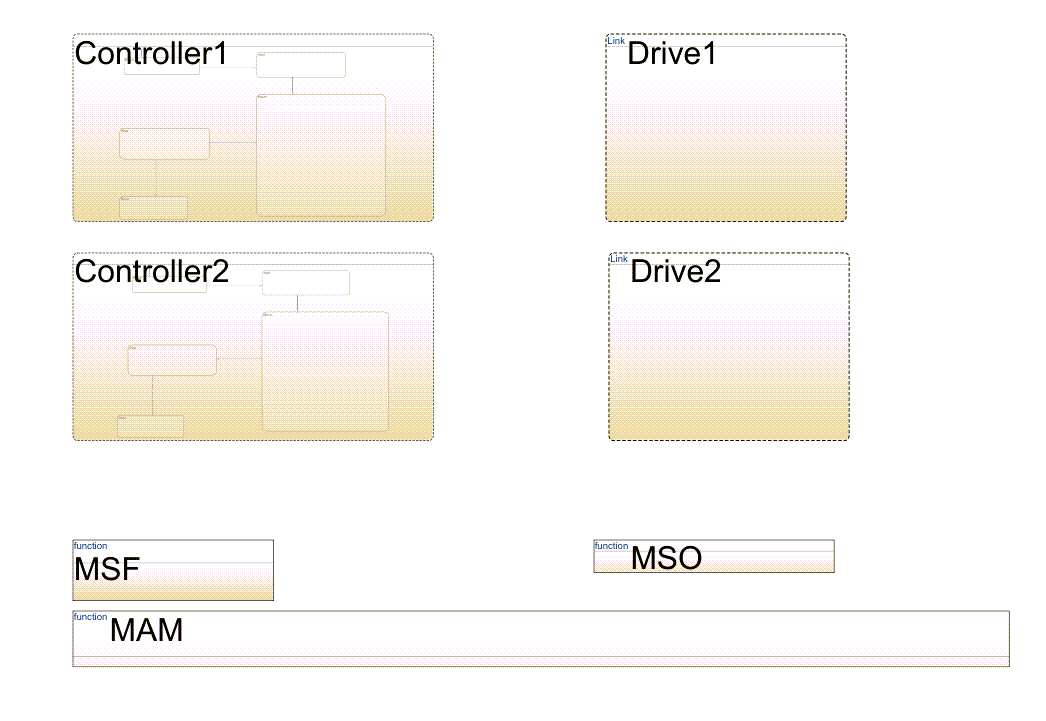
The model consists of a Stateflow® chart called MotionController. The MotionController chart consists of these components:
Controller1andController2subcharts that simulate the motion instruction.Drive1andDrive2subcharts that simulate the motion of a drive and the axis on which motion control is performed.MSF,MSO, andMAMgraphical functions that define the respective motion instructions.
Open the model:
load_system('MotionControllerExample'); open_system('MotionControllerExample/MotionController/Chart');
Generate Code
Generate structured text code for the chart by using the plcgeneratemotionapicode function:
warning('OFF', 'plccoder:plccg_ext:AutomaticTypeConversions'); plcgeneratemotionapicode('MotionControllerExample/MotionController');
Created temporary model for code generation :MotionController ### Generating PLC code for 'MotionController/MotionController'. ### Using model settings from 'MotionController' for PLC code generation parameters. ### Begin code generation for IDE Rockwell Studio 5000: AOI (studio5000). ### Emit PLC code to file. ### PLC code generation successful for 'MotionController/MotionController'. ### Generated files: plcsrc/MotionController.L5X
warning('ON', 'plccoder:plccg_ext:AutomaticTypeConversions');
Clean Up Generated Files
To close the model and clean up the generated files:
close_system('MotionControllerExample');