lftdata
Decompose uncertain objects into fixed certain and normalized uncertain parts
Syntax
[M,Delta] = lftdata(A); [M,Delta] = lftdata(A,List); [M,Delta,Blkstruct] = lftdata(A); [M,Delta,Blkstruct,Normunc] = lftdata(A);
Description
lftdata decomposes an uncertain object into a
fixed certain part and a normalized uncertain part. lftdata can also
partially decompose an uncertain object into an uncertain part and a normalized uncertain
part. Uncertain objects (umat, ufrd, uss)
are represented as certain (i.e., not-uncertain) objects in feedback with block-diagonal
concatenations of uncertain elements.
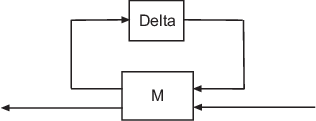
[M,Delta] = lftdata(A) separates the uncertain
object A into a certain object M and a normalized
uncertain matrix Delta such that A is equal to
lft(Delta,M), as shown below.
If A is a umat, then M will be
double; if A is a uss, then
M will be ss; if A is a
ufrd, then M will be frd. In all
cases, Delta is a umat.
[M,Delta] = lftdata(A,List) separates the
uncertain object A into an uncertain object M, in
feedback with a normalized uncertain matrix Delta. List
is a cell (or char) array of names of uncertain elements of A that make up
Delta. All other uncertainty in A remains in
M.
lftdata(A,fieldnames(A.Uncertainty)) is the same as
lftdata(A).
[M,DELTA,BLKSTRUCT] = lftdata(A) returns an
N-by-1 structure array BLKSTRUCT, where
BLKSTRUCT(i) describes the i-th normalized uncertain
element. This uncertainty description can be passed directly to the low-level structured
singular value analysis function mussv.
[M,DELTA,BLKSTRUCT,NORMUNC] = lftdata(A) returns
the cell array NORMUNC of normalized uncertain elements. Each normalized
element has 'Normalized' appended to its original name to avoid confusion.
Note that lft(blkdiag(NORMUNC{:}),M) is equivalent to A.
The normalizations for each type of uncertain element are described in Decomposing Uncertain Objects.
Examples
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)