Suspension System Comparison
This example shows a testbed containing five suspensions, excited by the same oscillating velocity source. The sprung and unsprung masses in each suspension branch may represent a quarter of the vehicle mass and the tire mass, respectively, and the velocity source may correspond to an uneven road profile.
The first uses the Shock Absorber block which includes linear stiffness and damping. Optional friction and hard stops are not used. The second suspension uses a Nonlinear Translational Spring and a Nonlinear Translational Damper specified by symmetric polynomials. The third uses a Variable Translational Spring and Variable Translational Damper. The spring constant is varied during the simulation using open-loop control, and the damping coefficient adjusts to ensure critical damping. Closed loop control can be added to simulate an adaptive suspension system. The fourth includes a Translational Inerter with the same linear stiffness and damping as in the first suspension. The inertance may be tuned for desired vibration mitigation. Lastly, the fifth uses an Air Spring block whose load is a function of height. Hard stops are optionally available.
Model

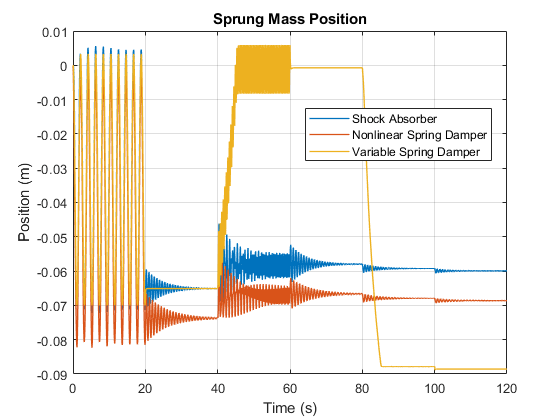
Simulation Results from Simscape Logging
The plot below shows the position of the sprung masses in five different suspension models that are subject to the same test.
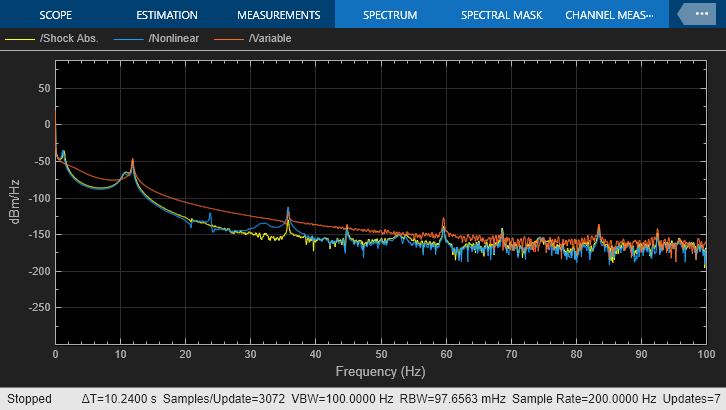
Power Spectral Density