Système à double masse-ressort
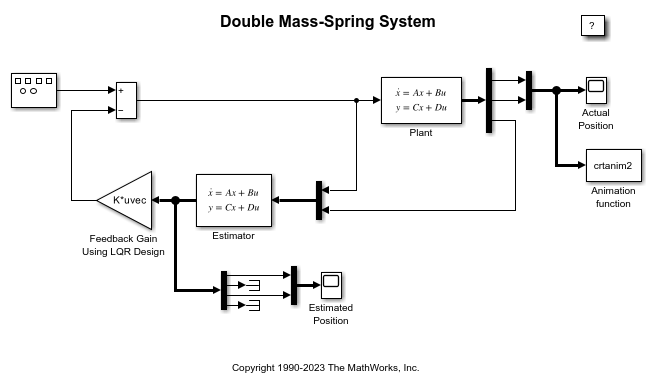
Cet exemple montre comment modéliser un système à double masse-ressort avec une fonction de forçage qui varie périodiquement. Le modèle utilise des blocs State-Space pour représenter le système physique et l’estimateur ainsi qu’un bloc Level-2 MATLAB S-Function pour animer le système à masse pendant la simulation. Le capteur et l’actionneur sont reliés à la masse de gauche. Cet exemple utilise l’estimation des états et le contrôle du régulateur linéaire-quadratique (LQR).

Voir aussi
Rubriques
- Design d'un servo-contrôleur LQR dans Simulink (Control System Toolbox)
- Système à double masse-ressort-amortisseur dans Simulink et Simscape (Simscape)