How PID Autotuning Works
To use PID autotuning, configure and deploy one of the PID autotuner blocks, Closed-Loop PID Autotuner or Open-Loop PID Autotuner.
Autotuning Process
The PID autotuner blocks work by performing a frequency-response estimation experiment. The blocks inject test signals into your plant and tune PID gains based on an estimated frequency response.
The following schematic diagram illustrates generally how a PID autotuner block fits into a control system.
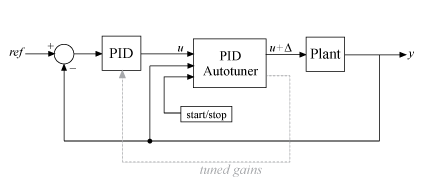
Until the autotuning process begins, the autotuner block relays the control signal directly from u to the plant input at u+Δu. In that state, the module has no effect on the performance of your system.
When the autotuning process begins, the block injects a test signal at u
out to collect plant input-output data and estimate frequency response
in real time.
If you use the Open-Loop PID Autotuner block, the block opens the feedback loop between u and u+Δu for the duration of the estimation experiment. It injects into u+Δu a superposition of sinusoidal signals at frequencies [1/3, 1, 3, 10]ωc, where ωc is your specified target bandwidth for tuning. For nonintegrating plants, the block can also inject a step signal to estimate the plant DC gain. All test signals are injected on top of the nominal plant input, which is the value of the signal at u when the experiment begins.
If you use the Closed-Loop PID Autotuner block, the plant remains under control of the PID controller with its current gains during the experiment. Closed-loop tuning uses sinusoidal test signals at the frequencies [1/10,1/3, 1, 3, 10]ωc.
When the experiment ends, the block uses the estimated frequency response to compute PID gains. The tuning algorithm aims to balance performance and robustness while achieving the control bandwidth and phase margin that you specify. You can configure logic to transfer the tuned gains from the block to your PID controller, allowing you to validate closed-loop performance in real time.
Workflow for PID Autotuning
The following steps provide a general overview of the workflow for PID autotuning.
Incorporate a PID autotuner block into your system, as shown in the schematic diagram.
Configure the start/stop signal that controls when the tuning experiment begins and ends. You can use this signal to initiate the PID autotuning process at any time. When you stop the experiment, the block returns tuned PID gains.
Specify controller parameters such as controller type and the target bandwidth for tuning.
Configure experiment parameters such as the amplitudes of the perturbations injected during the frequency-response experiment.
Start the autotuning process using the start/stop signal, and allow it to run long enough to complete the frequency-response estimation experiment.
Stop the autotuning process. When the experiment stops, the autotuner computes and returns tuned PID gains.
Transfer the tuned gains from the block to your PID controller. You can then validate the performance of the tuned controller in Simulink® or in real time.
For detailed information on performing each of these steps, see:
See Also
Closed-Loop PID Autotuner | Open-Loop PID Autotuner