Machine Mechanical Power
Machine mechanical power defined in the SI or per-unit system

Libraries:
Simscape /
Electrical /
Electromechanical /
Mechanical
Description
The Machine Mechanical Power block supplies specified power to, or draws specified power from, the machine that it connects to. It includes a representation of machine inertia and a mechanical rotational reference. In generator mode, the physical signal input defines the mechanical power that is input to the machine. In motor mode, it defines the mechanical power output from the machine.
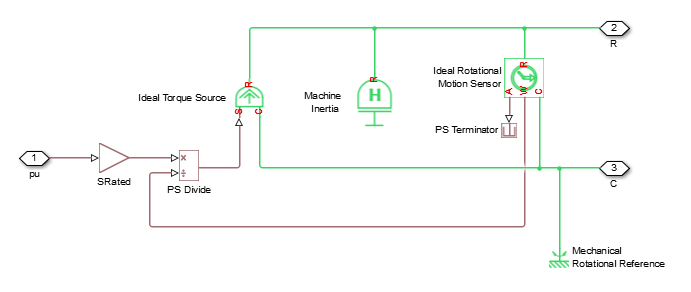
The figure shows an equivalent configuration to the per-unit variant model of the Machine Mechanical Power block using Simscape™ mechanical rotational components.
Electrical Defining Equations
The SI model converts the SI values that you enter in the dialog box to per-unit values for simulation. For information on the relationship between SI and per-unit machine parameters, see Per-Unit Conversion for Machine Parameters. For information on per-unit parameterization, see Per-Unit System of Units.
To calculate the torque that it applies to the inertia, the block divides the power demand by the present speed. To set the peak torque limit, specify a value for the Peak torque to rated torque ratio parameter. Use the Specify inertia parameterization by parameter to specify inertia, J, directly or indirectly, with the inertia constant for the machine, H.
If you specify the inertia constant for the machine, the block calculates inertia as
where:
J is inertia in kg⋅m2.
H is the inertia constant in sW/VA.
Srated is the rated apparent power of the connected machine in VA.
Frated is the rated electrical frequency of the connected machine in Hz.
N is the number of machine pole pairs.
Damping represents viscous friction between the machine rotor and mechanical rotational reference. Based on the value you select for the Specify damper parameterization by parameter, you specify a damping coefficient in per-unit or in SI units. If you specify the damping coefficient in per-unit, the block calculates the damping coefficient in SI units using these equations:
and
where:
ωbase is the base mechanical speed in rad/s.
Tbase is the base damping torque in Nm.
Dbase is the base damping coefficient in Nm/(rad/s).
Dpu is the damping coefficient in per-unit.
D is the damping coefficient in SI units of Nm/(rad/s).

Ports
Input
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2014b
See Also
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)