Simulation 3D Actor Transform Get
Get actor translation, rotation, scale
Libraries:
Vehicle Dynamics Blockset /
Vehicle Scenarios /
Sim3D /
Sim3D Core
Aerospace Blockset /
Animation /
Simulation 3D
Simulink 3D Animation /
Simulation 3D /
Utilities
Description
Note
Simulating models with the Simulation 3D Actor Transform Get block requires Simulink® 3D Animation™.
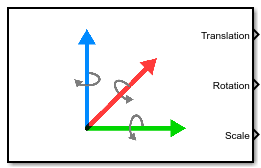
The Simulation 3D Actor Transform Get block provides the actor translation, rotation, and scale for the Simulink simulation environment.
The block uses a vehicle-fixed coordinate system that is initially aligned with the inertial world coordinate system.
| Axis | Description |
|---|---|
| X | Forward direction of the vehicle Roll — Right-handed rotation about X-axis |
| Y | Extends to the right of the vehicle, initially parallel to the ground plane Pitch — Right-handed rotation about Y-axis |
| Z | Extends upwards Yaw — Left-handed rotation about Z-axis |
Actors are scene objects that support 3D translation, rotation, and scale. Parts are actor components. Components do not exist by themselves; they are associated with an actor.
Tip
Verify that the Simulation 3D Scene
Configuration block executes before the Simulation 3D Actor Transform
Get block. That way, the Unreal Engine® 3D visualization environment prepares the data before the Simulation 3D
Actor Transform Get block receives it. To check the block execution order,
right-click the blocks and then click the Properties button ![]() . On the General tab, confirm these
Priority settings:
. On the General tab, confirm these
Priority settings:
Simulation 3D Scene Configuration —
0Simulation 3D Actor Transform Get —
1
For more information about execution order, see Control and Display Execution Order.
Examples

Scene Interrogation with Camera and Ray Tracing Reference Application
Interrogate a 3D Unreal Engine scene with a vehicle dynamics model by using a camera and ray tracing reference application project.