


Réaliser quatre activités courantes de Deep Learning avec MATLAB.

Cette série de vidéos aborde des sujets relatifs au Deep Learning destinés aux ingénieurs, tels que l'accès aux données, l'apprentissage d'un réseau, l'utilisation de l'apprentissage par transfert et l'intégration de votre modèle dans un design plus large.


Exemples
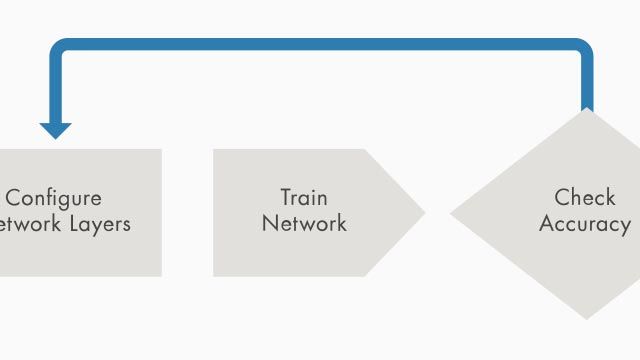
- Créer un réseau simple de Deep Learning pour la classification
MATLAB permet de créer et de modifier facilement des réseaux de neurones profonds. Ces tutoriels vidéos expliquent comment utiliser l'application Deep Network Designer, un outil de type pointer-cliquer qui vous permet de travailler de manière interactive avec vos réseaux de neurones profonds.



En savoir plus
- Apprentissage par transfert pour entraîner des modèles de Deep Learning
- Exemples pratiques de Deep Learning avec MATLAB (e-book)
- Inspection optique automatisée avec le Deep Learning (e-book)
Exemples
- Créer et explorer un datastore pour la classification d'images
- Prévision de séries temporelles avec le Deep Learning
- Utiliser MATLAB avec les GPU NVIDIA dans le cloud

Exemples
- Classification de séquences avec le Deep Learning
- Générer du texte grâce au Deep Learning
- Explorer les derniers exemples de Deep Learning sur GitHub

Rejoindre la Communauté des utilisateurs du Deep Learning

Version d'essai gratuite de 30 jours
Commencer
Vous avez des questions ?
Échangez avec un expert en Deep Learning.
Vous pouvez également sélectionner un site web dans la liste suivante :
Amériques
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asie-Pacifique
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)