Cette page a été traduite automatiquement.
Merci de bien vouloir compléter un sondage de 1 minute concernant la qualité de cette traduction.
Un système de capture de mouvement basé sur le Deep Learning permet d'étudier les guépards dans la nature
Comprendre l'étonnante agilité des guépards à travers la recherche robotique

La mère guépard sauvage et ses trois petits chassent un springbok à l'intérieur de l'immense parc transfrontalier de Kgalagadi, qui s’étend entre l'Afrique du Sud et le Botswana. Les félins capturent rapidement leur proie, leur agilité et leur accélération fulgurante constituant un avantage décisif. À une distance de sécurité, Amir Patel, professeur de biomécanique de l'Université du Cap et directeur de l’African Robotics Unit (ARU), oriente le système de capture de mouvement de son laboratoire vers la scène.
Patel et son équipe de l'ARU étudient la façon dont les guépards se déplacent pour construire des robots plus performants et plus agiles. « Le guépard est le summum de la manœuvrabilité », explique Patel. « Le comprendre nous pousse à concevoir de nouvelles méthodes de mesure du mouvement et de la force, ou à procéder à des optimisations de nos modèles. »
L’accent mis sur l’animal terrestre le plus rapide a donné lieu à de nombreuses avancées. Les chercheurs ont développé de nouvelles techniques en robotique, en modélisation multicorps, en système d’asservissement, en optimisation de trajectoire, en Computer Vision et en Deep Learning.
Les guépards sont exceptionnellement agiles, capables d’accélérations rapides et de virages serrés. (Crédit : Université du Cap, African Robotics Unit)
Bien que Patel utilisait MATLAB® et Simulink® depuis des années, une licence Campus-Wide lui permet, ainsi qu’à ses collègues chercheurs de l’université, de profiter pleinement de la plateforme.
« Nous choisissons les outils en fonction des problèmes que nous étudions », a déclaré Patel. « Lorsque nous avons obtenu la licence pour l’ensemble du site, je me suis dit : « OK, maintenant nous pouvons tout utiliser. » »
L'équipe a également découvert que MATLAB et Simulink offrent une interopérabilité fluide avec d'autres langages de programmation tels que Python® et avec du matériel comme Speedgoat®.
Patel a collaboré avec le Dr Mackenzie Mathis et le Dr Alexander Mathis et a appliqué leur toolbox open source (DeepLabCut™) pour le suivi non invasif du comportement animal, à la tâche de suivi des guépards évoluant dans la nature. Cette recherche a fait la couverture de la revue Nature Protocols.
Patel a ensuite reçu un Google Research Scholar Award dans la catégorie « machine perception » pour WildPose, son système de capture de mouvement basé sur le Deep Learning. MathWorks a également offert son soutien aux recherches du laboratoire. Les travaux de Patel ont généré deux brevets, permis le lancement d’une spin-off universitaire et suscité un énorme intérêt de la part des roboticiens, des scientifiques du sport, des cliniciens, des biologistes, des écologistes et des gestionnaires de la préservation de la nature.
Un vent favorable inattendu
Dans la nature, les guépards ont été chronométrés à des vitesses de sprints de 120 kilomètres par heure, ce qui en fait l'animal terrestre le plus rapide sur de courtes distances. Les grands félins peuvent accélérer rapidement et chasser leurs proies avec une facilité déconcertante, ce qui n'est pas surprenant étant donné leurs longues pattes et leur cou, leur petite tête et leurs griffes prêtes à l'emploi.
Environ 18 % des guépards du monde vivent en Afrique du Sud. En tant qu’ingénieur, Amir Patel a été très tôt fasciné par la faune locale. Lorsqu'il a commencé son doctorat à l'Université du Cap, il prévoyait d'utiliser les données du guépard pour développer un robot complet.
« Imaginez que vous êtes dans une voiture et que vous mettez votre bras par la fenêtre. Vous ressentez cette force. Nous avons déterminé que le guépard utilise cette traînée aérodynamique pour stabiliser son corps lors des virages à grande vitesse. »
« Il n’y avait aucune information sur la façon dont il utilise sa queue ou sa colonne vertébrale flexible, ni de modèles pour expliquer comment les guépards manœuvrent », se souvient-il.
Patel s'est concentré sur la longue queue velue. À l’époque, les données sur la queue étaient basées sur celles d’autres animaux. Les scientifiques n’étaient pas sûrs de son poids et de son inertie. L’opinion dominante parmi les experts de la faune sauvage était que les queues étaient lourdes et avaient une grande inertie pour agir comme des contrepoids.
Puis, l’une de ses collaboratrices au doctorat, la professeure Emily Lane du Jardin zoologique national de Pretoria, lui a proposé d’observer une autopsie d’un guépard mort de causes naturelles. Patel a pris des photos et des mesures pendant la procédure.
« Je m’attendais à ce que la queue soit imposante », a-t-il déclaré. « Mais elle était fine et ne représentait qu'environ 2 % de la masse corporelle du guépard. »
Pour mieux comprendre les effets aérodynamiques de la fourrure, Patel a placé des queues de guépards décédés, fournies par Lane, dans une soufflerie. Il a utilisé MATLAB et Simulink pour la modélisation.
« Imaginez que vous êtes dans une voiture et que vous mettez votre bras par la fenêtre. Vous ressentez cette force », a-t-il déclaré. « Nous avons déterminé que le guépard utilise cette traînée aérodynamique pour stabiliser son corps lors des virages à grande vitesse. »
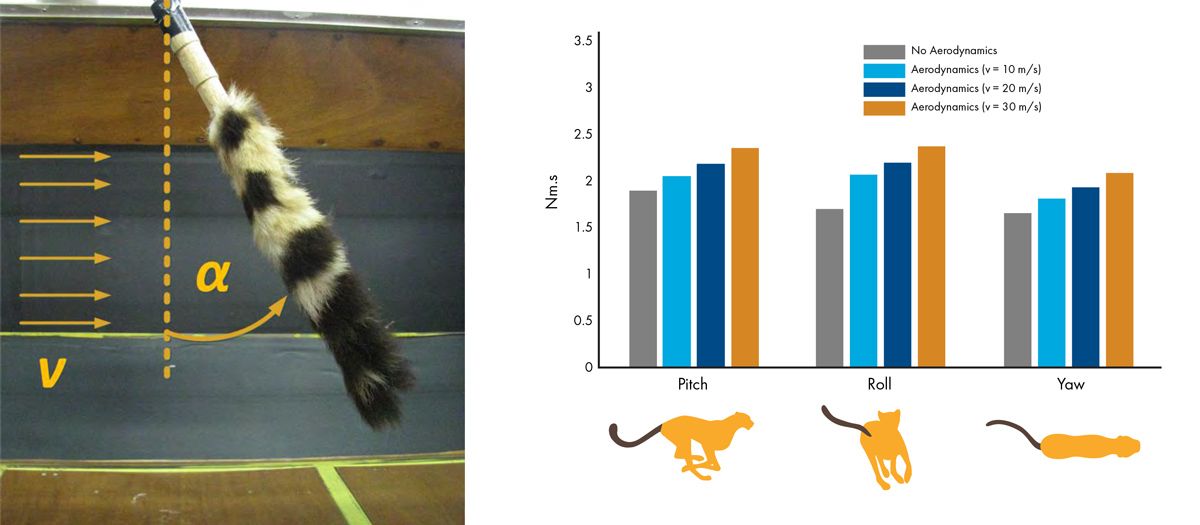
Des queues de guépards ont été placées dans une soufflerie pour comprendre les effets aérodynamiques de la fourrure. (Crédit : Amir Patel)
Les roboticiens s'inspirent souvent de la nature, mais Patel s'est retrouvé à faire de la biologie inspirée de la robotique, utilisant son expérience en robotique pour apporter un nouvel éclairage sur l'animal aux yeux dorés.
La bio-inspiration mène aux pistons
À l'ARU, Patel, l’un des quatre chercheurs principaux, étudie le guépard avec ses étudiants sous différents angles : en créant des modèles mathématiques de systèmes mécaniques, en détectant et en mesurant ce que fait l'animal et en construisant des robots qui servent de modèles mécaniques pour des mouvements complexes. La vitesse variable des guépards rend leur déplacement plus difficile à étudier que les mouvements animaux plus réguliers.
D’autres ingénieurs de l’ARU et lui ont construit un robot bipède nommé « Baleka », qui vient d’un mot Xhosa qui signifie « sprinter ». Leur design s’est appuyé sur des techniques d’optimisation de trajectoire, ce qui a permis à leur robot d’atteindre une agilité verticale supérieure à celle d’un humain.
Lors de la Conférence internationale sur la robotique et l'automatisation (ICRA) de 2023, Patel et son étudiant Christopher Mailer, ont présenté le design et le contrôle d'un prototype de robot novateur quadrupède, Kemba. Nommé d'après le mot zoulou « inkemba » ou épée, le prototype de plate-forme hybride pneumatique-électrique peut sauter à une hauteur d'environ 2,2 fois la longueur de sa jambe.
« Lorsque nous avons regardé des vidéos, nous avons vu que les guépards n'essayaient pas de contrôler finement leurs pieds, ils essayaient juste de pousser aussi fort qu'ils le pouvaient », a déclaré Patel. « Un piston pneumatique applique une force de manière similaire. »
Patel a indiqué que ses étudiants et lui partageaient une expérience commune en matière de système d’asservissement. Il semble donc naturel de réfléchir aux diagrammes en blocs et aux signaux passant d'un système à l'autre.
Test de saut du robot bipède Baleka. (Crédit : Université du Cap, African Robotics Unit)

Le robot à pattes Kemba. (Crédit : Université du Cap, African Robotics Unit)
Bien que les roboticiens évitent généralement les pistons pneumatiques car ils sont difficiles à contrôler avec précision, l'équipe de l'ARU a adopté ce procédé. Ils ont utilisé Simscape Multibody™ et Simulink pour modéliser les pistons pneumatiques au niveau des genoux de Kemba, simuler le mouvement attendu du robot quadripède et concevoir des contrôleurs pour celui-ci.
Patel a indiqué que lui et ses étudiants partageaient une expérience commune en matière de système s’asservissement. Il semble donc naturel de réfléchir aux diagrammes en blocs et aux signaux passant d'un système à l'autre. L'équipe a conçu Kemba avec un logiciel de CAO mécanique pour la modélisation multicorps, puis a transféré les designs dans Simscape™.
L’approche Model-Based Design permet à Patel et à ses étudiants d'observer les signaux d'accélération en temps réel, ce qu'il a qualifié d'extrêmement utile, en particulier pour le débuggage. Cet environnement de diagramme blocs a réduit le temps de développement de l'équipe, permettant des tests et des expérimentations rapides, l'optimisation du système et l'automatisation du code.
« Simulink Real-Time™ change la donne. « Autrefois, je codais manuellement, et il y avait toujours quelque chose qui ne fonctionnait pas », a-t-il déclaré. « Nous disposons désormais d'un système de contrôle en temps réel Speedgoat qui s'intègre facilement à Simulink Real-Time. Il suffit de cliquer sur un bouton et le robot l'exécute. Cela a rendu le développement simple et rapide. »
À l'ICRA, les scientifiques ont montré que Kemba avait le potentiel d'accélérer et de rebondir. Le robot à colonne vertébrale rigide peut sauter jusqu'à 1 mètre de hauteur (3,28 pieds).
L'ordre de contact est important pour les guépards comme pour les robots. Même avec une pince ou une main robotisée, un ordre de contact idéal pourrait faire toute la différence dans le déplacement ou la manipulation d'un objet. Lors d’une période sabbatique à Carnegie Mellon en 2018, Patel a lancé l'idée d'un algorithme d'optimisation des contacts plus précis.
Kemba accélère du repos à une démarche bondissante. (Crédit : Université du Cap, African Robotics Unit)
Quelques scientifiques avec qui il a discuté ont répondu : « Non, vous ne pouvez pas faire cela. Quelques groupes ont essayé il y a deux ans et cela ne fonctionne pas. » Il a continué quand même. L'article qui en résulte, « Contact-Implicit Trajectory Optimization Using Orthogonal Collocation », publié dans LIEEE Robotics and Automation Letters, est devenu l’une de ses publications les plus citées et a été finaliste en 2020 pour le prix du meilleur article du Comité technique IEEE sur l'optimisation basée sur les modèles pour la robotique.
« Il y a un avantage à être géographiquement isolé », a réfléchi Patel. « J’ai un peu cette mentalité d’outsider. »
Système de capture de mouvement à longue portée
Les guépards, confrontés à de nombreuses menaces, sont au bord de l’extinction. Malgré leur vitesse incroyable, ce sont des prédateurs timides qui doivent rivaliser avec les charognards pour conserver leurs proies. Le changement climatique, la perte d’habitat, les braconniers et les conflits avec les humains ont décimé les populations sauvages.
Le laboratoire a noué une relation très collaborative avec MathWorks. Les commentaires des chercheurs de l’ARU ont déjà inspiré de nouvelles fonctionnalités pour Computer Vision Toolbox et Lidar Toolbox qui sont en cours d’intégration dans les produits.
« Il y a un effort important en faveur des programmes de reproduction et de préservation pour augmenter les effectifs », a déclaré Patel. African Robotics Unit travaille avec trois centres pour guépards (Cheetah Outreach, Cheetah Conservation & Research Centre, and Ashia) dans la zone où les guépards sont habitués aux humains.
Les techniques biomécaniques existantes pour comprendre les mouvements humains ne peuvent pas être appliquées directement à la faune. Cela a conduit à repenser la manière de mesurer les mouvements des félins. « Je pensais que nous achèterions simplement des colliers et que nous les mettrions sur les guépards », a-t-il admis. « Mais lorsqu'un animal porte un collier, il n'y a aucune information sur sa tête, ses pattes, sa colonne vertébrale ou sa queue. »
Un système de caméra GPS orienté vers l'arrière développé par les scientifiques de l'ARU pour les guépards en captivité et permettant la fusion des capteurs a bien fonctionné... jusqu'à ce que les grands félins arrêtent d'accepter de le porter. Un autre obstacle : Les guépards des centres se déplacent plus lentement, soit 65 km/h (40 mph), que ceux dans la nature, qui atteignent 144 km/h (89 mph).
« En laboratoire, vous pouvez placer des électrodes sur une personne ou un animal et mesurer quand ils activent les muscles, mais vous ne pouvez pas vraiment toucher les animaux dans la nature », a déclaré Patel. « J’ai ensuite eu cette idée folle de pouvoir mesurer des animaux sauvages à distance : leur corps entier, la cinématique du squelette. »
L'ARU a commencé à travailler avec les parcs nationaux pour emmener le laboratoire dans la nature, où les chercheurs cherchent à recueillir des données plus représentatives sur les guépards en pleine vitesse. Cependant, obtenir une capture de mouvement granulaire sans électrodes ni dispositifs portables pose de puissants défis. Parfois, les félins se révèlent insaisissables dans le parc transfrontalier de Kgalagadi, émergeant brièvement pour disparaître un instant plus tard dans les dunes de sable.
Reconstruction 3D sans marqueur (non invasive) d'un guépard en train de courir. Plusieurs vues du guépard sont étiquetées en 2D puis fusionnées par l'algorithme d'estimation de trajectoire complète (FTE) pour produire un mouvement squelettique en 3D. (Crédit : Université du Cap, African Robotics Unit)
Patel et l’équipe de l’ARU ont alors développé un système de capture de mouvement à longue portée, utilisant des lentilles lidar et télescopiques, et en exploitant la fusion multicapteur, ils ont pu produire des données biomécaniques 3D sur de longues distances.

Les toolboxes MATLAB étaient essentielles pour analyser et modéliser les mouvements des guépards. (Crédit : Université du Cap, African Robotics Unit)
Les toolboxes MATLAB sont devenues essentielles pour les composants du projet tels que la reconstruction 3D, où l'équipe a combiné les informations lidar et caméra pour la fusion des capteurs. Control System Toolbox™ a permis d’appréhender la relation entrée-sortie entre le mouvement de la proie et celui des différentes parties du corps du guépard ou du corps entier du guépard.
« Nous utilisons beaucoup Computer Vision Toolbox pour la calibration », a noté Patel. « Lors du MathWorks Research Summit, tout le monde vantait la qualité de la calibration de la caméra. » Il s'est rendu à Natick, dans le Massachusetts, pour le sommet annuel, où il s'est entretenu avec le cofondateur de MathWorks, Cleve Moler, et a donné une conférence.
Le laboratoire a noué une relation très collaborative avec MathWorks. Les commentaires des chercheurs de l’ARU ont déjà inspiré de nouvelles fonctionnalités pour Computer Vision Toolbox™ et Lidar Toolbox™ qui sont en cours d’intégration dans les produits.
Outre les guépards, l'ARU a capturé d'autres animaux en mouvement, notamment des girafes, des lions et des springboks. Une fois que l’équipe aura validé son système, elle espère le rendre accessible dans le monde entier.
Lors d’une période sabbatique en tant que professeur invité à l'Université d'Oxford, Patel s'est concentré sur l'amélioration de la mesure des signes vitaux des animaux dans la nature. Certaines maladies peuvent passer des animaux domestiques aux animaux sauvages et se propager si rapidement que les écologistes ne le savent souvent que lorsqu'il est trop tard, en particulier dans les zones à faibles ressources. Une surveillance à distance plus intelligente et plus accessible pourrait fournir un système d’alerte précoce.
Ces systèmes à distance pourraient également être bénéfiques pour la santé humaine, en permettant aux cliniciens de mesurer des éléments tels que l’activation musculaire chez les patients sans avoir à préparer la peau et à coller des électrodes coûteuses. Patel voit un potentiel de ce système dans la réhabilitation des lésions de la moelle épinière et dans l'adaptation de prothèses.
Les scientifiques du sport ont exprimé leur intérêt pour le système de capture de mouvement portable breveté de l'ARU. Un autre brevet portant sur le système de plaque de force 3D, abordable et couvrant de grandes surfaces, a donné naissance à une nouvelle entreprise dérivée de l'université, actuellement en développement. Un groupe du laboratoire travaille également à donner à Kemba une colonne vertébrale active.

Le Dr Patel et son équipe étudient le contrôle optimal inverse et le Reinforcement Learning pour mieux comprendre le mouvement du guépard. (Crédit : Amir Patel)
Le groupe de Patel se lance aussi dans l’exploration du Reinforcement Learning inverse et du contrôle optimal. « Bien que nous puissions observer le mouvement, nous ne savons toujours pas pourquoi le guépard fait ce qu'il fait », a-t-il déclaré. « Le félin essaie-t-il de conserver son énergie lorsqu’il court, d’augmenter sa manœuvrabilité ou d’intercepter sa proie dans le plus rapidement possible ? Le Reinforcement Learning inverse nous aidera à comprendre ce qu'il essaie d'optimiser. »
Les félins continuent de le fasciner.
« Au cours de mon doctorat, j’ai changé d’état d’esprit pour devenir quelqu’un qui veut comprendre cet animal », a-t-il déclaré. « Cela fait plus de 13 ans et je n'ai jamais regretté mon choix. »

Lire d'autres articles
ROBOTIQUE
Une équipe de neuf étudiants de premier cycle développe un robot sauteur innovant pour son projet final
« Ascento », petit et agile, monte les escaliers et évite les obstacles
ROBOTIQUE
À la découverte du plus grand écosystème du monde, 500 mètres sous la surface de l'océan
Nat Geo développe une caméra robotisée sous-marine pour explorer les profondeurs
MONDE ACADÉMIQUE
Décrypter le vol du papillon grâce à des caméras à haute vitesse et une soufflerie
La dynamique des fluides aide à comprendre le battement d’ailes des papillons