Cette page a été traduite automatiquement.
Merci de bien vouloir compléter un sondage de 1 minute concernant la qualité de cette traduction.
Exploration de l'utilisation des satellites en orbite basse, pour le positionnement basé uniquement sur Doppler comme alternative au GPS
Par Megan O. Moore, Virginia Polytechnic Institute and State University
« En utilisant MATLAB et Satellite Communications Toolbox, nous avons non seulement montré qu'en moyenne, au moins cinq satellites sont visibles depuis pratiquement n'importe quel endroit de la Terre, mais aussi que la diversité spatiale obtenue avec quatre satellites est comparable à celle qui peut être obtenue avec huit. »
En tant qu'élément essentiel de l'infrastructure américaine, le système de positionnement global (GPS) fournit des informations de positionnement, de navigation et de synchronisation (PNT) essentielles pour de nombreux secteurs, notamment les interventions d'urgence, l'arpentage et la construction, ainsi que l'agriculture. Compte tenu de son utilisation généralisée et de son importance, les inquiétudes concernant la vulnérabilité du système au brouillage, à l'usurpation d'identité et à d'autres menaces se sont accrues, conduisant à une législation ordonnant au US Department of Transportation de fournir un complément et une alternative au service GPS.
Le coût élevé de la mise en place de satellites en orbite terrestre moyenne (MEO) – soit pour mettre à niveau le GPS, soit pour établir une nouvelle constellation de satellites – a suscité un intérêt accru pour l’utilisation de signaux d'opportunité. Ces signaux, qui ne sont pas conçus pour le PNT, peuvent néanmoins être utilisés pour le positionnement basé uniquement sur Doppler, qui ne nécessite que des informations accessibles au public sur les orbites et la fréquence de transmission des satellites. Avec le lancement de grandes constellations en orbite terrestre basse (LEO), telles que Starlink et OneWeb, la possibilité d’utiliser le positionnement basé uniquement sur Doppler comme solution alternative au GPS a augmenté. Non seulement il y a plus de signaux d’opportunité disponibles, mais ces signaux ont une perte de trajet plus faible car les satellites sont plus proches de la Terre et la vitesse plus élevée des satellites LEO entraîne des décalages Doppler plus importants et plus faciles à mesurer.
L’utilisation potentielle des constellations LEO pour le positionnement et la navigation basés uniquement sur Doppler est un domaine de recherche actif. Récemment, un collègue chercheur, le Dr Mark Psiaki de Virginia Tech, a publié un article montrant que lorsque huit satellites de la même constellation sont en vue, il est possible d'atteindre un niveau de précision comparable au GPS. Cependant, avec le déploiement actuel des satellites LEO, la nécessité de huit satellites visibles limite la praticabilité de cette approche. Une collaboration entre le Dr William « Chris » Headley du Virginia Tech National Security Institute, le Dr Michael Buehrer de Wireless@VT et moi-même explore la possibilité d’opérer avec moins de satellites en vue en prenant plusieurs mesures de chaque satellite au fil du temps, en remplaçant la diversité spatiale par la diversité temporelle (Figure 1). Nous avons récemment démontré la faisabilité de cette approche en utilisant MATLAB® et Satellite Communications Toolbox. Nous avons non seulement démontré qu’en moyenne, au moins cinq satellites sont visibles depuis pratiquement n’importe quel endroit de la Terre, mais aussi que la diversité spatiale obtenue avec quatre satellites est comparable à celle qui peut être obtenue avec huit.
Figure 1. Une animation du visualiseur de scénarios satellites de quatre satellites Starlink LEO, montrant les champs de vision de chaque satellite (cercles magenta), les trajectoires orbitales (lignes bleues) et les lignes de visée (lignes vertes) vers un point au sol stationnaire à Cap Canaveral, en Floride.
Comprendre GDOP et D-GDOP
Pour analyser les erreurs du GPS, les chercheurs ont développé une mesure appelée dilution géométrique de la précision (GDOP). Le GDOP quantifie la disposition géométrique des satellites par rapport à un récepteur, les valeurs GDOP inférieures indiquant de meilleures configurations géométriques et donc une précision de positionnement plus élevée. Par exemple, un agencement avec un satellite GPS directement au-dessus et trois autres positionnés à l'horizon entraînerait une mesure GDOP relativement faible, tandis que quatre satellites regroupés dans la même zone auraient une mesure GDOP plus élevée, et donc une précision de positionnement plus faible.
Un concept similaire appelé D-GDOP a été développé pour le positionnement basé uniquement sur Doppler. Contrairement à la formule GDOP traditionnelle utilisée pour le GPS, D-GDOP prend en compte la vitesse et l'accélération des satellites en vue. Par conséquent, une géométrie satellite qui minimise le GDOP ne minimiserait pas nécessairement le D-GDOP et vice versa. Pour aller encore plus loin, le D-GDOP échelonné dans le temps, ou D-GDOPT, est le même concept mais appliqué à une approche dans laquelle les mesures Doppler de chaque satellite sont prises au fil du temps, plutôt que toutes en même temps. Pour notre étude, nous voulions comparer les mesures de D-GDOPT (avec quatre satellites, par exemple) avec les mesures de D-GDOP avec huit satellites, ce qui nous permettrait de déterminer si la diversité temporelle peut servir de substitut adéquat à la diversité spatiale. Mais tout d’abord, nous devions vérifier qu’il était raisonnable de s’attendre à ce qu’au moins quatre satellites soient en vue pour une constellation LEO donnée.
Analyse de la disponibilité des satellites
Lors de l’évaluation de la visibilité d’un satellite, l’un des premiers facteurs à prendre en compte est l’élévation du satellite au-dessus de l’horizon. Avec le GPS, par exemple, un masque d'élévation de 10 degrés est généralement utilisé : tous les satellites au-dessus de cette élévation sont considérés comme visibles, négligeant les blocages potentiels dus aux obstructions. Pour notre analyse des satellites LEO, nous avons dû appliquer un masque similaire, mais qui prend en compte les faisceaux utilisés pour la communication par ces satellites, qui sont considérablement plus étroits que ceux utilisés par les satellites GPS. Sur la base de la documentation technique et des documents déposés auprès de la Federal Communications Commission (FCC), nous avons défini un masque d'élévation pour les satellites OneWeb à 25 degrés et un masque d'élévation pour les satellites Starlink à 40 degrés. À des altitudes inférieures à ces masques, les signaux des satellites seraient probablement trop faibles pour être utilisés de manière fiable.
Ensuite, nous devions déterminer quels satellites étaient visibles depuis différentes positions sur Terre. Pour évaluer la disponibilité mondiale, nous avons vérifié la visibilité tous les 10 degrés de latitude et 60 degrés de longitude autour du globe en utilisant des données orbitales réelles provenant des satellites Starlink et OneWeb. Plus précisément, nous avons utilisé des données d'éléments à deux lignes (TLE) pour ces constellations que nous avons téléchargées à partir de CelesTrak.
En travaillant dans MATLAB avec Satellite Communications Toolbox, nous avons créé un scénario de satellite pour modéliser et visualiser les satellites en orbite en fonction des données téléchargées. Nous avons utilisé la fonction satellite permettant de lire et d’analyser les fichiers TLE textuels pour une orbite complète, soit environ 95 minutes pour Starlink et 110 minutes pour OneWeb. Presque instantanément, nous avons pu visualiser les orbites des satellites dans le visualiseur de scénarios satellites. La fonction link nous a permis d'effectuer une analyse de liaison pour déterminer les intervalles pendant lesquels le signal de chaque satellite serait utilisable à partir d'un récepteur particulier au sol.
Nous avons ensuite écrit un script MATLAB qui parcourait toutes les combinaisons de latitude et de longitude (par incréments de 10 et 60 degrés, respectivement) et calculait le nombre moyen de satellites en vue à chaque emplacement (Figure 2). Cette analyse a montré qu’à tous les endroits vérifiés, au moins cinq satellites étaient visibles en moyenne, et dans certaines zones plus éloignées de l’équateur, beaucoup plus.


Figure 2. Visibilité des satellites à différentes latitudes pour la constellation OneWeb (premier) et la constellation Starlink (deuxième). Aux latitudes proches de l'équateur, il y a généralement moins de satellites visibles puisqu'un degré de longitude à l'équateur couvre une distance environ deux fois plus longue qu'un degré de longitude à 60 degrés de latitude.
Évaluation de D-GDOP échelonné dans le temps
Une fois que nous avons établi qu’en moyenne, cinq satellites LEO ou plus d’une même constellation sont susceptibles d’être visibles depuis n’importe quel endroit, l’étape suivante consistait à calculer des mesures D-GDOP échelonnées dans le temps et à les comparer aux mesures D-GDOP traditionnelles calculées avec huit satellites. Bien qu'il soit théoriquement possible d'utiliser un seul satellite avec des mesures Doppler prises à huit moments différents, dans la pratique, cela produit un D-GDOP extrêmement élevéT en raison du manque de diversité des vecteurs de vitesse utilisés dans son calcul. Compte tenu de notre analyse de la visibilité des satellites, nous avons choisi d’utiliser quatre satellites, chacun mesuré à deux moments différents. De plus, comme nous ne savions pas a priori quelle était la durée optimale entre les mesures (Δt), nous avons considéré des valeurs de Δt de 1 seconde à 101 secondes, par incréments de 1 seconde. (A un intervalle de plus de 101 secondes, il peut arriver que certains ou tous les satellites soient sortis de la vue.)
À des fins de comparaison, nous avons considéré des scénarios dans lesquels exactement huit satellites étaient en vue afin que le D-GDOP traditionnel puisse être calculé. Nous avons écrit un script MATLAB pour calculer le D-GDOP pour tous les moments au sein d'une seule orbite lorsque exactement huit satellites étaient en vue depuis Cap Canaveral en Floride. Nous avons ensuite sélectionné les scénarios avec les D-GDOP les plus élevés et les plus bas pour chaque constellation, avant de calculer le D-GDOPT en utilisant les 70 combinaisons possibles de quatre satellites sur les huit pour chaque scénario (en supposant Δt = 1). Enfin, après avoir choisi les combinaisons qui ont donné les valeurs les plus élevées et les plus basses de D-GDOPT, nous avons écrit un script MATLAB pour automatiser le processus de calcul de D-GDOPT pour les combinaisons de quatre satellites choisies sur la plage Δt de 100 secondes. Les plus basses valeurs de D-GDOPT atteintes sont présentées dans le tableau 1 pour les quatre scénarios, ainsi que les valeurs D-GDOP du meilleur et du pire des cas pour les deux constellations. En général, les mesures de D-GDOPT étaient considérablement meilleures que les scénarios D-GDOP du pire des cas et comparables aux scénarios D-GDOP du meilleur des cas.
| Constellation | D-GDOP | D-GDOP minimumT Meilleure combinaison | D-GDOP minimumT Pire combinaison |
| OneWeb | 25 | 52 | 174 |
| OneWeb | 3 746 | 428 | 1 581 |
| Starlink | 9 | 11 | 49 |
| Starlink | 611 | 22 | 26 |
Tableau 1. Les valeurs D-GDOPT minimales pour les meilleures et les pires combinaisons de quatre satellites, comparées aux valeurs D-GDOP correspondantes de la combinaison correspondante de huit satellites.
Au cours de notre analyse, nous avons rencontré des valeurs D-GDOP inhabituellement élevées, telles que la valeur 3 746 calculée pour le pire des scénarios OneWeb. Dans des recherches antérieures, qui ne tenaient pas compte des masques d’élévation plus élevés, l’analyse D-GDOP a donné lieu à des valeurs beaucoup plus petites. En fait, l’écart important entre certaines des valeurs D-GDOP les plus élevées mises en évidence par notre analyse et ces valeurs beaucoup plus petites d’autres chercheurs nous a d’abord fait réfléchir et a ensuite mis en évidence l’un des avantages de l’utilisation de Satellite Communications Toolbox. Si nous avions codé nos propres routines de propagation d’orbite pour obtenir la vitesse et l’accélération des satellites nécessaires aux calculs D-GDOP, un écart aussi important nous aurait fait remettre en question notre implémentation. Dans ce cas, comme nous avons utilisé des fonctions de toolbox éprouvées, nous avons eu confiance dans les résultats et avons économisé des heures de programmation et de révision de code.
Dans le cadre de l'analyse, nous avons également examiné de plus près la manière dont différentes valeurs de Δt affectent D-GDOPT. Nous avons constaté que D-GDOPT peut parfois augmenter à des valeurs plus élevées de Δt, et dans certains cas, la pire combinaison pourrait commencer à surpasser ce qui était la meilleure combinaison de satellites à Δt = 1 (Figure 3). Les raisons à l’origine de ce phénomène sont complexes. D'une part, comme Δt augmente, les satellites sont plus éloignés de leurs positions initiales, augmentant la diversité spatiale. D’autre part, cela modifie également les vitesses des satellites par rapport à un récepteur au sol. Une meilleure compréhension de l'interaction entre les vecteurs de position, de vitesse et d'accélération dans les calculs D-GDOP sera nécessaire pour trouver les valeurs optimales de Δt ; c’est une piste possible de recherche future.
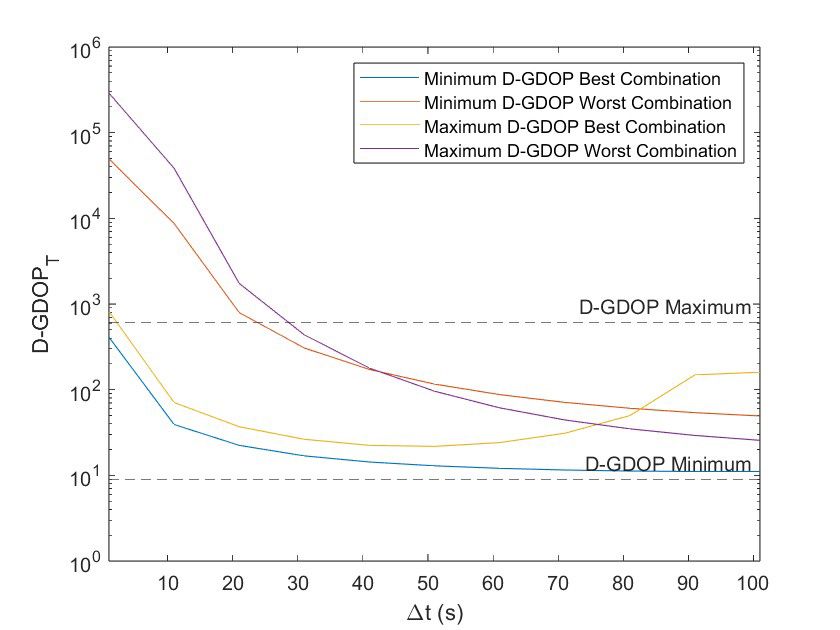
Figure 3. Tracé des valeurs D-GDOPT sur toute la gamme de Δt.
Prochaines étapes
Après avoir démontré qu’il est possible d’utiliser le positionnement basé uniquement sur Doppler lorsque moins de huit satellites LEO sont disponibles, l’objectif de nos recherches s’étend dans plusieurs directions. Premièrement, notre recherche initiale n’a considéré que les utilisateurs stationnaires. Pour les piétons, l'effet de la vitesse de l'utilisateur sur nos calculs serait probablement minime, mais pour les avions et autres véhicules à grande vitesse, nous devons tenir compte du fait que la position de l'utilisateur peut changer considérablement lorsque Δt augmente.
Le Dr Zak Kassas de Ohio State University a exploré l'utilisation de satellites de plusieurs constellations, en combinant, par exemple, des mesures prises par les satellites OneWeb, Starlink et Iridium®. Des recherches plus poussées pourraient impliquer de combiner son approche avec l’approche échelonnée dans le temps pour augmenter encore la disponibilité. De plus, nous prévoyons un examen plus approfondi des stratégies de minimisation D-GDOP, potentiellement avec Global Optimization Toolbox. L’une de nos prochaines étapes les plus importantes consiste à développer un modèle complet capable de déterminer la position sur la base de mesures Doppler échelonnées dans le temps provenant de moins de huit satellites LEO.
Publié en 2024