Deploy AUTOSAR Adaptive Architecture Model
This example shows how to deploy a Simulink® System Composer™ (architecture) model as an AUTOSAR adaptive application using Embedded Coder® Support Package for Linux Applications. This example demonstrates adaptive communication using events and methods.
The architecture model used in this example has three components, OutdoorLightSensor, HeadLightController, and HeadLightActuator. OutdoorLightSensor processes the data received from sensor and sends the data to HeadLightController by using adaptive events. HeadLightController calls the method from HeadLightActuator to turn on or off the headlight using adaptive methods. HeadLightActuator turns the car head light on or off based on the input received from HeadLightController.
You can use the Embedded Coder Support Package for Linux Applications to generate the code, create executables from the architecture model, perform external mode simulation of an AUTOSAR adaptive model and run and stop the application on the target environment. The OutdoorLightSensor component in the architecture model used in this example is configured for external mode. The configuration parameter Hardware Board in the Hardware Implementation section is set to Embedded Coder Linux Docker Container for the architecture model and its component models. For more information about external mode simulation, see External Mode Simulation of Deployed Applications (Embedded Coder).
Build and Deploy the Application
Open the
HeadLightControlSystemmodel.
open_system("HeadLightControlSystem");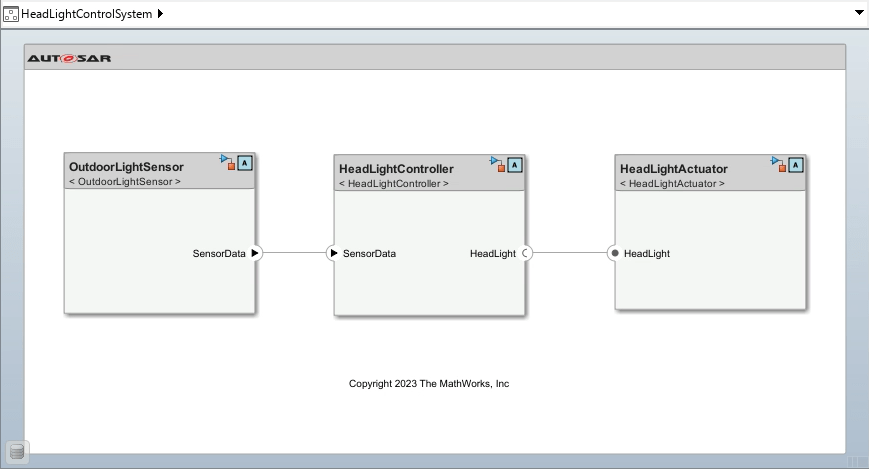
For the architecture model and the component models, set Hardware Implementation > Hardware board to
Embedded Coder Linux Docker Containerfor x86_64 targets andEmbedded Coder Linux Docker Container - ARM64for ARM targets.Set Code Generation > Build process > Toolchain to
AUTOSAR Adaptive Linux Executable.For
OutdoorLightSensorcomponent, in the Code Generation > Interface > Data exchange interface, selectExternal modeto enable external mode for the component.Open the Linux Runtime Manager app by clicking Apps > Linux Runtime Manager from the model toolstrip.
Connect to a target computer. For more information on setting up the target computer, see Set Up Linux Target Computer (Embedded Coder).
Deploy the
HeadLightControlSystemmodel to the target by clicking Linux Target > Prepare > Create & Deploy Application Package and selecting the model. For more information, see Build Simulink Model and Deploy Application (Embedded Coder).
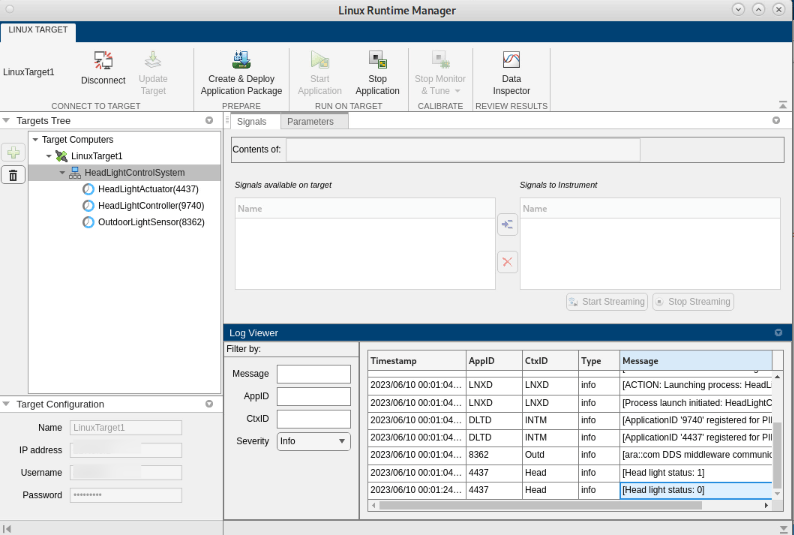
After the model is built and the adaptive application is successfully deployed on the target, you can see the deployed application including the executables in the Targets Tree.
Launch and Calibrate the Application
Select the
OutdoorLightSensorexecutable in the Targets Tree and click Linux Target > Calibrate > Monitor & Tune to start the external mode simulation of theOutdoorLightSensorexecutable.Select the
HeadLightControlSystemin the Targets Tree and click Linux Target > Run On Target > Start Application to launch the remaining executables of the adaptive application on the target.
Now all the three executables are running on the target and you can see Head light status: 1 in the Log Viewer section of the Linux Runtime Manager app indicating that the headlights are on.
On the
OutdoorLightSensormodel, rotate the knob to a value greater than 5. You can see the messageHead light status: 0indicating that the headlights are turned off.Rotate the knob back to a value less than 5. You can see the message
Head light status: 1indicating that the headlights are turned on.Stop the application by clicking Linux Target > Run On Target > Stop Application.
Video Walkthrough
For a walkthrough of the example, play the video.
See Also
deployApplicationPackage (Embedded Coder)
Topics
- Build Simulink Model and Deploy Application (Embedded Coder)
- Support Package Installation (Embedded Coder)
- External Mode Simulation of Deployed Applications (Embedded Coder)