Autocorrelation LPC
Determine coefficients of Nth-order forward linear predictors

Libraries:
DSP System Toolbox /
Estimation /
Linear Prediction
Description
The Autocorrelation LPC block determines the coefficients of an N-step forward linear predictor for the time-series in each length-M input channel, u, by minimizing the prediction error in the least squares sense. A linear predictor is an FIR filter that predicts the next value in a sequence from the present and past inputs. This technique has applications in filter design, speech coding, spectral analysis, and system identification.
The Autocorrelation LPC block can output the prediction error for each channel as polynomial coefficients, reflection coefficients, or both. The block can also output the prediction error power for each channel.
Examples
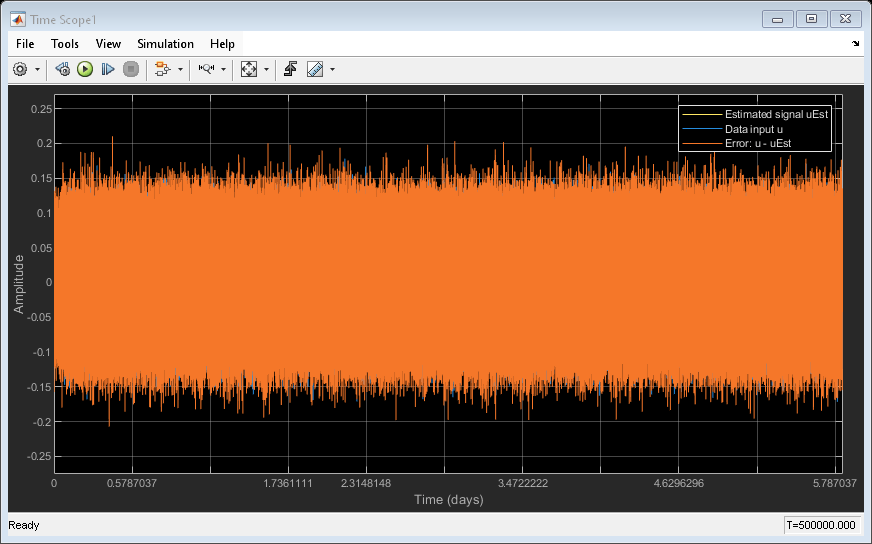
Estimate Data Series Using Forward Linear Predictor
Use the Autocorrelation LPC block to estimate the future values of signal.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
The Autocorrelation LPC block computes the least squares solution to
where indicates the 2-norm and
Solving the least squares problem via the normal equations
leads to the system of equations
where r = [r1r2r3 ... rn+1]T is an autocorrelation estimate for u computed using the Autocorrelation block, and * indicates the complex conjugate transpose. The normal equations are solved in O(n2) operations by the Levinson-Durbin block.
Note that the solution to the LPC problem is very closely related to the Yule-Walker AR method of spectral estimation. In that context, the normal equations above are referred to as the Yule-Walker AR equations.
References
[1] Haykin, S. Adaptive Filter Theory. 3rd ed. Englewood Cliffs, NJ: Prentice Hall, 1996.
[2] Ljung, L. System Identification: Theory for the User. Englewood Cliffs, NJ: Prentice Hall, 1987. Pgs. 278-280.
[3] Proakis, J. and D. Manolakis. Digital Signal Processing. 3rd ed. Englewood Cliffs, NJ: Prentice-Hall, 1996.
Extended Capabilities
Version History
Introduced before R2006a