Generalized Optimal Subpattern Assignment Metric
Calculate Generalized Optimal Subpattern Assignment Metric

Libraries:
Sensor Fusion and Tracking Toolbox /
Track Metrics
Description
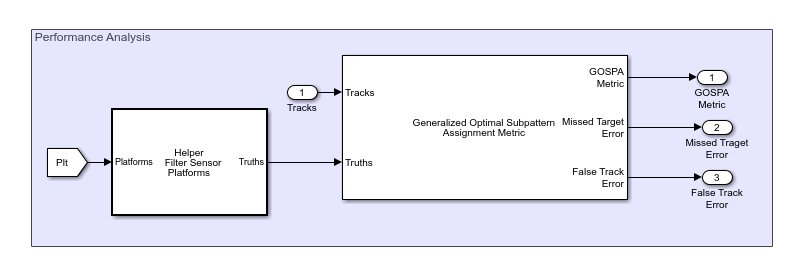
The Generalized Optimal Subpattern Assignment Metric block evaluates the performance of a tracking algorithm by computing the generalized optimal subpattern assignment (GOSPA) metric between tracks and known truths. The metric is comprised of the switching error, localization error, missed target error, and false track error components. You can also select each individual error components as a block output.
Examples

Track-Level Fusion of Radar and Lidar Data in Simulink
Autonomous systems require precise estimation of their surroundings to support decision making, planning, and control. High-resolution sensors such as radar and lidar are frequently used in autonomous systems to assist in estimation of the surroundings. These sensors generally output tracks. Outputting tracks instead of detections and fusing the tracks together in a decentralized manner provide several benefits, including low false alarm rates, higher target estimation accuracy, a low bandwidth requirement, and low computational costs. This example shows you how to track objects from measurements of a radar and a lidar sensor and how to fuse them using a track-level fusion scheme in Simulink®. You process the radar measurements using a Gaussian Mixture Probability Hypothesis Density (GM-PHD) tracker and the lidar measurements using a Joint Probabilistic Data Association (JPDA) tracker. You further fuse these tracks using a track-level fusion scheme. The example closely follows the Track-Level Fusion of Radar and Lidar Data MATLAB® example.
Track Point Targets in Dense Clutter Using GM-PHD Tracker in Simulink
Radars generally receive echoes from all surfaces in the signal path. These unwanted back-scattered signals or echoes generated from physical objects are called clutter. In a densely cluttered environment, missed detections and false alarms make tracking objects a challenging task for conventional trackers such as Global Nearest-Neighbor (GNN) tracker. In such an environment a PHD tracker provides better estimation of objects as it can handle multiple detections per object per sensor without clustering them first. This example shows you how to track points targets in dense clutter using a Gaussian mixture probability hypothesis density (GM-PHD) tracker with a constant velocity model in Simulink®. The example closely follows the Track Point Targets in Dense Clutter Using GM-PHD Tracker MATLAB® example.