Idmodel
Simulate identified linear model in Simulink software
Libraries:
System Identification Toolbox /
Models
Description
The Idmodel block simulates the output of an identified linear model
using time-domain input data. The model is a state-space (idss),
linear grey-box (idgrey), polynomial (idpoly),
transfer function (idtf), or process (idproc)
model that you previously estimated or created. For the simulation of state-space and
linear grey-box models, you can specify the initial state values. For other linear
models, specify initial conditions using an initialCondition object.
You can also add noise to the simulated output.
Examples
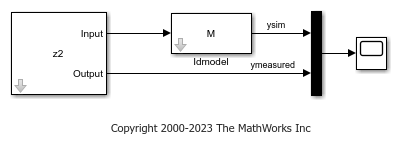
Simulate Identified Linear Model in Simulink with Initial Conditions
Set the initial states for simulating a linear model such that the simulation provides a best fit to measured input-output data.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2008a