Label Point Cloud Using Automation Algorithm
The Lidar Labeler app enables you to automatically label your point cloud data. You can use any of the included algorithms or create a custom automation algorithm.
Follow these steps to label point cloud data using an automation algorithm.
Load the data into the app, and create ROI label definitions. For more details, see Create and Export Labels and Label Definitions.
On the LABEL tab of the app toolstrip, click Select Algorithm in the Automate Labeling section.
Select an existing automation algorithm, or click Add Algorithm to create a new algorithm. For more details on how to create and import a new algorithm, see Create Custom Automation Algorithm for Labeling.
Select Automate. The app opens the Automate tab. Follow the automation instructions on the right pane of the app.
Click Run to apply the automation algorithm.
Automation Algorithms
The Lidar Labeler app provides these in-built automation algorithms that you can use to label your point cloud data.
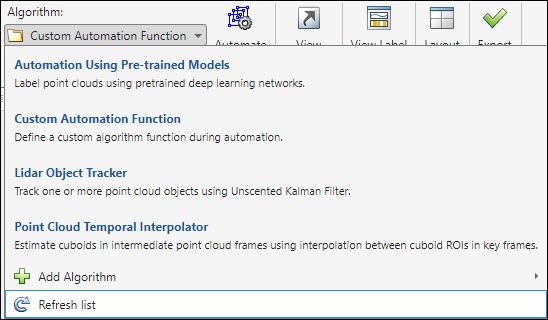
Automation Using Pre-trained Models — Use deep learning models to automatically label your data.
In the Settings dialog box, select from a list of existing pretrained models for PointPillars, SalsaNext, and SqueezeSegV2 networks, or import a custom deep learning network.
Note
The custom network must be a
DAGNetwork(Deep Learning Toolbox) object trained for segmentation or object detection in point clouds.Map the label definitions to the output classes of the network.
Run the automation algorithm, and get your automated labels.
Custom Automation Function — Use a custom function to automate labeling. For more information, see Create Automation Algorithm Function for Labeling.
Lidar Object Tracker — Automate labeling by tracking an object across different point cloud frames. To use this algorithm, you must draw a cuboid ROI label on the object to track. You can also draw multiple labels to track more than one object. Once you run the algorithm, you can accept or reject the generated labels. You can also undo the run and perform it again.
The app displays the step-by-step procedure on the right pane when you select the Lidar Object Tracker algorithm.
Point Cloud Temporal Interpolator — Estimate cuboid ROI labels between point cloud frames by interpolating the ROI locations across a time interval. To use this algorithm, you must draw a cuboid ROI on a minimum of two frames: one at the beginning of the interval and one at the end of the interval. The interpolation algorithm estimates and draws ROI labels in the intermediate frames.
Consider a point cloud sequence with 10 frames. The first frame has a cuboid ROI centered at (5, 5, 0). The 10th frame has a cuboid ROI centered at (25, 25, 0). At each frame, the algorithm moves the ROI 2 points in the x-direction, 2 points in the y-direction, and 0 points in the z-direction. Therefore, the algorithm centers the ROI at (7, 7, 0) in the second frame, (9, 9, 0) in the third frame, and so on, up to (23, 23, 0) in the second-to-last frame.
Export Labels and Save Labeling Session
After labeling your point cloud data, on the LABEL tab of the app toolstrip, select Export to export the labels. You can export both labels and label definitions to a file or to the MATLAB workspace.
You can also manage your data by saving and loading app sessions. To save your session, and then reopen it later to continue labeling the same data, on the LABEL tab,
Select Save Session, and then either Save or Save As, to save the current labeling session.
Click New Session, in the dialog box that opens, specify a session folder.
Click Open Session, and select one of the listed recent sessions, or navigate to the folder of a previous session.
See Also
Apps
Objects
Topics
- Create and Export Labels and Label Definitions
- Create Custom Automation Algorithm for Labeling
- Create Automation Algorithm Function for Labeling
- Automate Ground Truth Labeling for Vehicle Detection Using PointPillars
- Automate Ground Truth Labeling for Lidar Point Cloud Semantic Segmentation Using Lidar Labeler