Import, View, and Export Point Cloud
Import Data
You can import point cloud data from PLY, PCAP, LAS, LAZ, PCD, E57, or rosbag files,
or any custom source, into the Point Cloud
Analyzer app. You can also import pointCloud objects from the MATLAB® workspace.
Use these steps to import point cloud data.
On the app toolstrip, select Import > From File. Choose a data source from the list.
In the Import dialog box, specify the location of the point cloud data from the selected data source.
To load point clouds from the workspace, select Import > From Workspace on the app toolstrip. In the Import From Workspace dialog box that appears, select the variables or objects from the workspace you want to import. If you want to load variables as a sequence of multiple frames, select the Load variables as sequence (multiple frames) parameter. By default, this parameter is cleared.



View Data
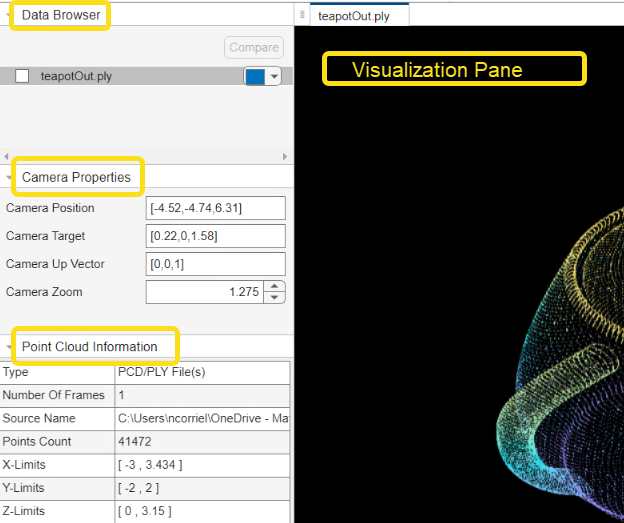
The app lists the loaded data in the Data Browser. When you select any point cloud signal from the Data Browser, the app displays it in the visualization pane.
The Camera Properties tab displays the tunable camera information, such as camera position, target vector, and percentage zoom. You can change these properties to view the point cloud from different camera angles. For more information on the camera properties, see Camera Graphics Terminology.
The Point Cloud Information pane displays the metadata of the selected point cloud.
To delete the imported data, right-click the data you want to delete and select Delete Data.
Tip
You can adjust the point cloud view by using the x-, y-, and z-axes at the bottom-left corner of the visualization pane.

Play Point Cloud Sequence
If the input data contains multiple point cloud frames, the visualization pane displays a sequence of point clouds and the Playback Slider, which contains playback controls.

The app provides these playback controls. The buttons, from left to right, are:
First Frame
Previous Frame
Play
Next Frame
Last Frame
For point cloud data with timestamp information, such as PCAP files and rosbags, the app displays the Start Time, Current Time, and the End Time on the Playback Slider.
Note
The app does not show the Playback Slider if the input data contains only one point cloud frame.
Compare Point Clouds
From the Data Browser, select the point clouds that you want to compare and click Compare. The app opens a Compare tab where you can visualize the selected point clouds in the Point Cloud Overlay visualization pane. You can use Compare to compare an edited point cloud with the original one. For information on how to edit a point cloud in the app, see Edit Point Cloud.
Note
The app shows the Playback Slider only if at least one of the point clouds being compared contains multiple frames.
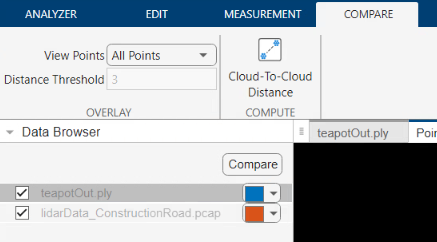
Use View Points to view inlier points, outlier points, or both in the overlaid point cloud. The app uses the Distance Threshold value to identify the inlier and outlier points.
You can also compute the distance between the overlaid points by selecting Cloud-To-Cloud Distance. The app compares the target point cloud with the reference point cloud to generate the point-to-point or point-to-plane distance. When you click Compute, the app display the metrics in the Point Cloud Information pane.

Note
A Windows® OS machine must have WebGL™ 2 support for graphics rendering.
Export Data
To export your point clouds after processing them, from the app toolstrip, select Export Point Cloud. The Point Cloud Analyzer app opens the Export Point Cloud dialog box.
Select the point clouds you want to export. In the Provide path to the destination folder box, specify or browse to the destination folder. You can export point clouds as PCD, PLY, LAS, or LAZ files.
You can later load the exported file into the app interactively. Alternatively, at the
MATLAB command prompt, you can use this syntax, where fileName
is the name of the exported file, including its file extension.
pointCloudAnalyzer(fileName)
If the specified file is not on the MATLAB search path, you must specify the full file path.