mpcmoveExplicit
Compute optimal control using explicit MPC
Syntax
Description
Use this command to simulate an explicit MPC controller in closed-loop with a
plant model. Call mpcmoveExplicit repeatedly in a for loop to calculate
the manipulated variable and update the controller states at each time step.
mv = mpcmoveExplicit(empcobj,x,ym,r)mv and updates the states
xc of the controller empcobj.
The manipulated variable mv at the current time is calculated given:
the controller object,
empcobj,a pointer to the current estimated extended state,
xc,the measured plant outputs,
ym,the output references,
r,and the measured disturbance input,
v.
If ym, r or v is
specified as [], or if it is missing as a last input argument,
mpcmove uses the appropriate mpcobj.Model.Nominal
value instead.
When using default state estimation, mpcmoveExplicit also updates
the controller state referenced by the handle object xc. Therefore,
when using default state estimation, xc always points to the updated
controller state. When using custom state estimation, you should update
xc prior to each mpcmoveExplicit call.
Examples
This example shows how to use mpcmoveExplicit to simulate a plant in closed loop with an explicit MPC controller.
First, define the sample time, the plant (for this example, a double integrator), and create a traditional MPC object.
Ts = 0.1; plant = tf(1,[1 0 0]); mpcobj = mpc(plant,0.1);
-->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
Define constraints on the manipulated variable.
mpcobj.MV = struct('Min',-1,'Max',1);
The MPC controller states include states from the plant model, the disturbance model noise model, and the last values of the manipulated variables, in that order. To create a range structure where you can specify the range for each state, reference, and manipulated variable, use generateExplicitRange.
range = generateExplicitRange(mpcobj);
-->Converting the "Model.Plant" property to state-space. -->Converting model to discrete time. Assuming no disturbance added to measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
If at run time any of these variables falls outside its range, the controller returns an error status and sets the manipulated variables to their last values. Therefore, it is important that you do not underestimate these ranges. For this example, use the following ranges.
range.State.Min(:) = [-10;-10]; range.State.Max(:) = [10;10]; range.Reference.Min = -2; range.Reference.Max = 2; range.ManipulatedVariable.Min = mpcobj.MV.Min -1; range.ManipulatedVariable.Max = mpcobj.MV.Max +1;
Create an explicit MPC controller from the traditional MPC object and the range structure.
empcobj = generateExplicitMPC(mpcobj, range);
Regions found / unexplored: 9/ 0
Set up the number of simulation steps and initialize arrays to store the plant input and output signals (so they can be plotted later).
N = round(5/Ts); U = zeros(N,1); Y = zeros(N,1);
Discretize the plant, and set up its initial condition.
dtplant = ss(c2d(plant,Ts)); x = [0 0]';
To obtain a handle (that is, a pointer) to the controller state, use mpcstate.
xc = mpcstate(empcobj)
MPCSTATE object with fields
Plant: [0 0]
Disturbance: [1×0 double]
Noise: [1×0 double]
LastMove: 0
Covariance: [2×2 double]
The controller has two states for the internal plant model, and one to hold the last value of the manipulated variable. All these states are initialized to zero.
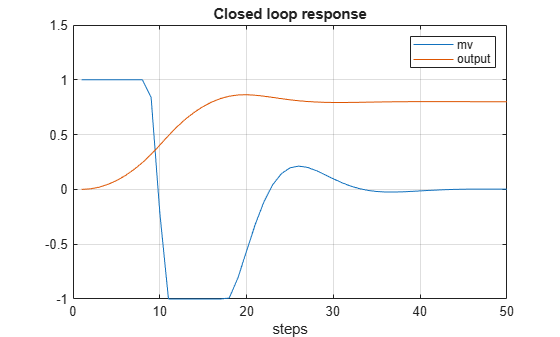
Iteratively simulate the closed-loop response to a reference signal of 0.8. To calculate the explicit MPC controller move, use mpcmoveExplicit.
for k = 1:N % update plant measurement and store signal y = dtplant.C*x; Y(k)=y; % compute explicit MPC action and store signal u = mpcmoveExplicit(empcobj,xc,y,0.8); U(k)=u; % update plant state x = dtplant.A*x + dtplant.B*u; end
Plot the resulting plant input and output signals.
plot(1:N,[U Y]) title('Closed loop response') legend('mv','output') xlabel('steps') grid
Input Arguments
Output Arguments
Tips
Use the Explicit MPC Controller Simulink block for simulation and code generation.
Version History
Introduced in R2014b
See Also
Functions
generateExplicitMPC|generateExplicitRange|generateExplicitOptions|simplify|generatePlotParameters|plotSection|sim
Objects
mpc|explicitMPC|mpcstate