GCC DOA and TOA
Generalized cross-correlator with phase transform
Libraries:
Phased Array System Toolbox /
Direction of Arrival
Description
The GCC DOA and TOA block estimates the direction of arrival and time of arrival of a signal at an array. The block uses a generalized cross-correlation with phase transform (GCC-PHAT) algorithm.
Ports
Input
Output
Parameters
Main Tab
Source
Property | When you set this parameter
to |
Auto | When you set this parameter
to |
Sensor pairs, specified as a 2-by-M matrix of strictly positive integers.
Dependencies
This parameter appears only when you set the Source of
sensor pairs parameter to
Property.
Check this box to output the correlations computed using the GCC-PHAT
algorithm as well as the corresponding lags between sensor pairs.
Correlation values are output via the Rxy port. Lag
values are output via the Lags port. These ports
appear only when you check the Enable correlation
output box. Clear this check box to disable output of
correlations.
Select this check box to output the delay corresponding to the arrival
angle of a signal between each sensor pair. The delay is output in the
Tau port. This port appears only when you check
the Enable delay output box. Clear this check box
to disable output of delays.
Sensor Array Tab
Element Parameters
Dependencies
To enable this parameter, set Element type to Cardioid Antenna.
Coordinate system of custom antenna pattern, specified
az-el or phi-theta. When you
specify az-el, use the Azimuth angles
(deg) and Elevations angles (deg) parameters to
specify the coordinates of the pattern points. When you specify
phi-theta, use the Phi angles (deg)
and Theta angles (deg) parameters to specify the coordinates of the
pattern points.
Dependencies
To enable this parameter, set Element type to
Custom Antenna.
Phi angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-P row vector. P must be greater than 2. Angle units are in degrees. Phi angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to
Custom Antenna and the Coordinate system of custom
antenna pattern parameter to
phi-theta.
Theta angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-Q row vector. Q must be greater than 2. Angle units are in degrees. Theta angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to
Custom Antenna and the Coordinate system of custom
antenna pattern parameter to
phi-theta.
Align directions of the element normals to the direction of the array normal.
Dependencies
This parameter is enabled when Element type is set to
Custom Antenna.
Beamwidth of antenna pattern, specified as a 1-by-2 real-valued vector.
Dependencies
This parameter is enabled when Element type is set to
Gaussian Antenna.
Array Parameters
Dimensions of a URA array, specified as a positive integer or 1-by-2 vector of positive integers.
If Array size is a 1-by-2 vector, the vector has the form
[NumberOfArrayRows,NumberOfArrayColumns].If Array size is an integer, the array has the same number of rows and columns.
When you set Specify sensor array as to
Replicated subarray, this parameter applies to each subarray.
For a URA, array elements are indexed from top to bottom along the
leftmost column, and then continue to the next columns from left to right. In this
figure, the Array size value of [3,2] creates an
array having three rows and two columns.

Dependencies
To enable this parameter, set Geometry to
URA.
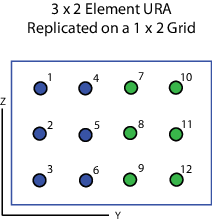
Rectangular subarray grid size, specified as a single positive integer, or a 1-by-2 row vector of positive integers.
If Grid size is an integer scalar, the array has
an equal number of subarrays in each row and column. If
Grid size is a 1-by-2 vector of
the form [NumberOfRows, NumberOfColumns], the
first entry is the number of subarrays along each column. The
second entry is the number of subarrays in each row. A row is
along the local y-axis, and a column is along
the local z-axis. The figure here shows how
you can replicate a 3-by-2 URA subarray using a Grid
size of [1,2].
Dependencies
To enable this parameter, set Sensor
array to Replicated
subarray and Subarrays
layout to
Rectangular.
Version History
Introduced in R2015b