gccphat
Generalized cross-correlation
Syntax
Description
tau = gccphat(sig,refsig)tau, between the signal,
sig, and a reference signal, refsig. Both
sig and refsig can have multiple channels. The
function assumes that the signal and reference signal come from a single source. To estimate
the delay, gccphat finds the location of the peak of the cross-correlation
between sig and refsig. The cross-correlation is
computed using the generalized cross-correlation phase transform (GCC-PHAT) algorithm. Time
delays are multiples of the sample interval corresponding to the default sampling frequency of
one hertz.
[___] = gccphat( or sig)[___]
= gccphat( returns
the estimated delays and cross correlations between all pairs of channels
in sig,fs)sig. If sig has M columns,
the resulting tau and R have M2 columns.
In these syntaxes, no reference signal input is used. The first M columns
of tau and R contain the
delays and cross correlations that use the first channel as the reference.
The second M columns contain the delays and cross-correlations
that use the second channel as the reference, and so on.
Examples
Load a gong sound signal. First, use the gong signal as a reference signal. Then, duplicate the signal twice, introducing time delays of 5 and 25 seconds. Leave the sampling rate to its default of one hertz. Use gccphat to estimate the time delays between the delayed signals and the reference signal.
load gong;
refsig = y;
delay1 = 5;
delay2 = 25;
sig1 = delayseq(refsig,delay1);
sig2 = delayseq(refsig,delay2);
tau_est = gccphat([sig1,sig2],refsig)tau_est = 1×2
5 25
Load a gong sound signal. Use the gong signal as a reference signal. Then, duplicate the signal, introducing a time delays of 5 milliseconds. Use the sampling rate of 8192 Hz. Use gccphat to estimate the time delay between the delayed signal and the reference signal.
load gong;
delay = 0.005;
refsig = y;
sig = delayseq(refsig,delay,Fs);
tau_est = gccphat(sig,refsig,Fs)tau_est = 0.0050
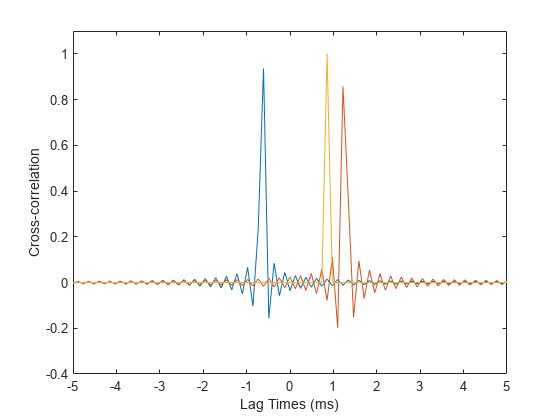
Load a musical sound signal with a sample rate is 8192 hertz. Then, duplicate the signal three times and introduce time delays between the signals. Estimate the time delays between the delayed signals and the reference signals. Plot the correlation values.
load handel;
dt = 1/Fs;
refsig = y;Create three delayed versions of the signal.
delay1 = -5.2*dt; delay2 = 10.3*dt; delay3 = 7*dt; sig1 = delayseq(refsig,delay1,Fs); sig2 = delayseq(refsig,delay2,Fs); sig3 = delayseq(refsig,delay3,Fs);
Cross-correlate the delayed signals with the reference signal.
[tau_est,R,lags] = gccphat([sig1,sig2,sig3],refsig,Fs);
The gccphat functions estimates the delay to the nearest sample interval.
disp(tau_est*Fs)
-5 10 7
Plot the correlation functions.
plot(1000*lags,real(R(:,1))) xlabel('Lag Times (ms)') ylabel('Cross-correlation') axis([-5,5,-.4,1.1]) hold on plot(1000*lags,real(R(:,2))) plot(1000*lags,real(R(:,3))) hold off
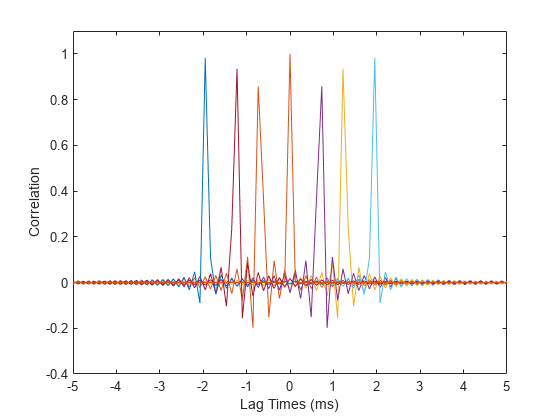
Load a musical sound signal with a sample rate is 8192 hertz. Then, duplicate the signal two times and introduce time delays between the two signals and the reference signal. Estimate the time delays and plot the cross-correlation function between all pairs of signals.
load handel;
dt = 1/Fs;
refsig = y;Create three delayed versions of the signal.
delay1 = -5.7*dt; delay2 = 10.2*dt; sig1 = delayseq(refsig,delay1,Fs); sig2 = delayseq(refsig,delay2,Fs);
Cross-correlate all signals with the other signal.
[tau_est,R,lags] = gccphat([refsig,sig1,sig2],Fs);
Show the time delays in units of sample interval. The algorithm estimates time delays quantized to the nearest sample interval. Cross-correlation of three signals produce 9 possible time delays, one for each possible signal pair.
disp(tau_est*Fs)
0 -6 10 6 0 16 -10 -16 0
A signal correlated with itself gives zero lag.
Plot the correlation functions.
for n=1:9 plot(1000*lags,real(R(:,n))) if n==1 hold on xlabel('Lag Times (ms)') ylabel('Correlation') axis([-5,5,-.4,1.1]) end end hold off
Input Arguments
Output Arguments
More About
References
[1] Knapp, C. H. and G.C. Carter, “The Generalized Correlation Method for Estimation of Time Delay.” IEEE Transactions on Acoustics, Speech and Signal Processing. Vol. ASSP-24, No. 4, Aug 1976.
[2] G. C. Carter, “Coherence and Time Delay Estimation.” Proceedings of the IEEE. Vol. 75, No. 2, Feb 1987.
Extended Capabilities
Version History
Introduced in R2015b