backscatterBicyclist
Backscatter radar signals from bicyclist
Description
The backscatterBicyclist object simulates backscattered radar signals
reflected from a moving bicyclist. The bicyclist consists of both the bicycle and its rider.
The object models the motion of the bicyclist and computes the sum of all reflected signals
from multiple discrete scatterers on the bicyclist. The model ignores internal occlusions
within the bicyclist. The reflected signals are based on a multi-scatterer model developed
from a 77 GHz radar system.
Scatterers are located on five major bicyclist components:
Bicycle frame and rider
Bicycle pedals
Upper and lower legs of the rider
Front wheel
Back wheel
Excluding the wheels, there are 114 scatterers on the bicyclist. The wheels
contain scatterers on the rim and spokes. The number of scatterers on the wheels depends on
the number of spokes per wheel. The number of spokes is specified using the
NumWheelSpokes property.
You can obtain the current bicyclist position and velocity by calling the move object
function. Calling this function also updates the position and velocity for the next time
epoch. To obtain the reflected signal, call the reflect object
function. You can plot the instantaneous position of the bicyclist using the plot object
function.
Creation
Syntax
bicyclist = backscatterBicyclist
bicyclist = backscatterBicyclist(Name,Value,...)
Description
bicyclist = backscatterBicyclistbackscatterBicyclist object, bicyclist, having
default property values.
bicyclist = backscatterBicyclist(Name,Value,...)backscatterBicyclist object, bicyclist, with
each specified property Name set to the specified
Value. You can specify additional name-value pair arguments in any
order as
(Name1,Value1,...,NameN,ValueN).
Any unspecified properties take default values. For
example,
bicyclist = backscatterBicyclist( ...
'NumWheelSpokes',18,'Speed',10.0, ...
'InitialPosition',[0;0;0],'InitialHeading',90, ...
'GearTransmissionRatio',5.5);This figure illustrates a bicyclist starting to turn left.
Properties
Object Functions
Examples
Compute the backscattered radar signal from a bicyclist moving along the x-axis at 5 m/s away from a radar. Assume that the radar is located at the origin. The radar transmits an LFM signal at 24 GHz with a 300 MHz bandwidth. A signal is reflected at the moment the bicyclist starts to move and then one second later.
Initialize Bicyclist, Waveform, and Propagation Channel Objects
Initialize the backscatterBicyclist, phased.LinearFMWaveform, and phased.FreeSpace objects. Assume a 300 MHz sampling frequency. The initial position of the bicyclist lies on the x-axis 30 meters from the radar.
bw = 300e6; fs = bw; fc = 24e9; radarpos = [0;0;0]; bpos = [30;0;0]; bicyclist = backscatterBicyclist( ... 'OperatingFrequency',fc,'NumWheelSpokes',15, ... 'InitialPosition',bpos,'Speed',5.0, ... 'InitialHeading',0.0); lfmwav = phased.LinearFMWaveform( ... 'SampleRate',fs, ... 'SweepBandwidth',bw); sig = lfmwav(); chan = phased.FreeSpace( ... 'OperatingFrequency',fc, ... 'SampleRate',fs, ... 'TwoWayPropagation',true);
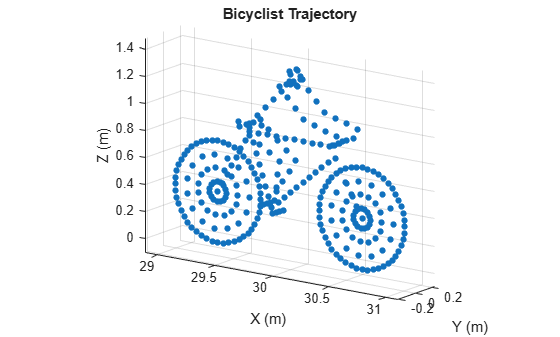
Plot Initial Bicyclist Position
Using the move object function, obtain the initial scatterer positions, velocities and the orientation of the bicyclist. Plot the initial position of the bicyclist. The dt argument of the move object function determines that the next call to move returns the bicyclist state of motion dt seconds later.
dt = 1.0; [bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)
Obtain First Reflected Signal
Propagate the signal to all scatterers and obtain the cumulative reflected return signal.
N = getNumScatterers(bicyclist); sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [rngs,ang] = rangeangle(radarpos,bpos,bax); y0 = reflect(bicyclist,sigtrns,ang);
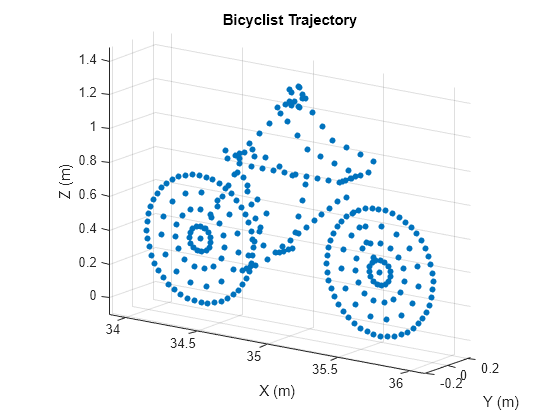
Plot Bicyclist Position After Position Update
After the bicyclist has moved, obtain the scatterer positions and velocities and then move the bicycle along its trajectory for another second.
[bpos,bvel,bax] = move(bicyclist,dt,0); plot(bicyclist)
Obtain Second Reflected Signal
Propagate the signal to all scatterers at their new positions and obtain the cumulative reflected return signal.
sigtrns = chan(repmat(sig,1,N),radarpos,bpos,[0;0;0],bvel); [~,ang] = rangeangle(radarpos,bpos,bax); y1 = reflect(bicyclist,sigtrns,ang);
Match Filter Reflected Signals
Match filter the reflected signals and plot them together.
mfsig = getMatchedFilter(lfmwav); nsamp = length(mfsig); mf = phased.MatchedFilter('Coefficients',mfsig); ymf = mf([y0 y1]); fdelay = (nsamp-1)/fs; t = (0:size(ymf,1)-1)/fs - fdelay; c = physconst('LightSpeed'); plot(c*t/2,mag2db(abs(ymf))) ylim([-200 -50]) xlabel('Range (m)') ylabel('Magnitude (dB)') ax = axis; axis([0,100,ax(3),ax(4)]) grid legend('First pulse','Second pulse')
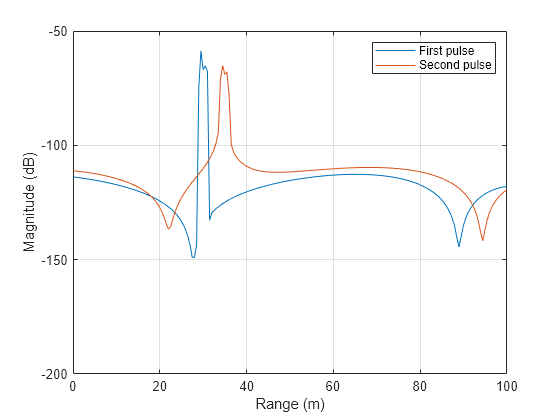
Compute the difference in range between the maxima of the two pulses.
[maxy,idx] = max(abs(ymf)); dpeaks = t(1,idx(2)) - t(1,idx(1)); drng = c*dpeaks/2
drng = 4.9965
The range difference is 5 m, as expected given the bicyclist speed.
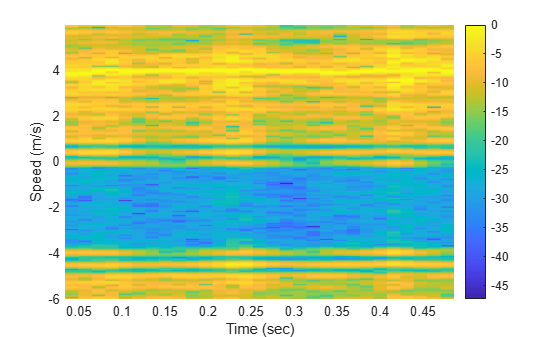
Display a spectrogram showing the micro-Doppler effect on radar signals reflected from the scatterers on a moving bicyclist target. A stationary radar transmits 1000 pulses of an FMCW radar wave with a bandwidth of 250 MHz and of 1 duration. The radar operates at 24 GHz. The bicyclist starts 5 m from the radar and moves away at 4 m/s.
Set up the waveform, channel, transmitter, receiver, and platform System objects.
bw = 250e6; fs = 2*bw; fc = 24e9; c = physconst('Lightspeed'); tm = 1e-6; wav = phased.FMCWWaveform('SampleRate',fs,'SweepTime',tm, ... 'SweepBandwidth',bw); chan = phased.FreeSpace('PropagationSpeed',c,'OperatingFrequency',fc, ... 'TwoWayPropagation',true,'SampleRate',fs); radarplt = phased.Platform('InitialPosition',[0;0;0], ... 'OrientationAxesOutputPort',true); trx = phased.Transmitter('PeakPower',1,'Gain',25); rcvx = phased.ReceiverPreamp('Gain',25,'NoiseFigure',10);
Create a bicyclist object moving at 4 meters/second.
bicyclistSpeed = 4; bicyclist = backscatterBicyclist('InitialPosition',[5;0;0],'Speed',bicyclistSpeed, ... 'PropagationSpeed',c,'OperatingFrequency',fc,'InitialHeading',0.0); lambda = c/fc; fmax = 2*bicyclist.GearTransmissionRatio*bicyclistSpeed/lambda; tsamp = 1/(2*fmax);
Loop over 1000 pulses. Find the angle of incidence of the radar. Propagate the wave to each scatterer, and then reflect the wave from the scatterers back to the radar.
npulse = 1000; xr = complex(zeros(round(fs*tm),npulse)); for m = 1:npulse [posr,velr,axr] = radarplt(tsamp); [post,velt,axt] = move(bicyclist,tsamp,0); [~,angrt] = rangeangle(posr,post,axt); x = trx(wav()); xt = chan(repmat(x,1,size(post,2)),posr,post,velr,velt); xr(:,m) = rcvx(reflect(bicyclist,xt,angrt)); end
Process the arriving signals. First, dechirp the signal and then pass the signal into a Kaiser-windowed short-time Fourier transform.
xd = conj(dechirp(xr,x)); M = 128; beta = 6; w = kaiser(M,beta); R = floor(1.7*(M-1)/(beta+1)); noverlap = M - R; [S,F,T] = stft(sum(xd),1/tsamp,'Window',w,'FFTLength',M*2, ... 'OverlapLength',noverlap); maxval = max(10*log10(abs(S))); pcolor(T,-F*lambda/2,10*log10(abs(S))-maxval); shading flat; colorbar xlabel('Time (sec)') ylabel('Speed (m/s)')
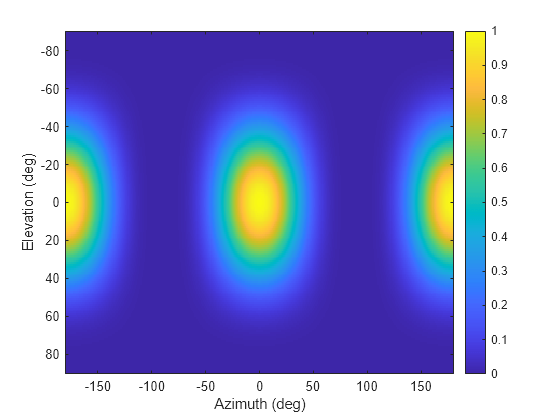
Create a custom RCS pattern to use with the backscatterBicyclist object.
The RCS pattern is computed from cosines raised to the fourth power. Plot the pattern.
az = [-180:180]; el = [-90:90]; caz = cosd(az').^4; cel = cosd(el).^4; rcs = (caz*cel)'; imagesc(az,el,rcs) xlabel('Azimuth (deg)') ylabel('Elevation (deg)') colorbar
bicyclist = backscatterBicyclist( ... 'NumWheelSpokes',18,'Speed',10.0, ... 'InitialPosition',[0;0;0],'InitialHeading',90, ... 'GearTransmissionRatio',5.5,'AzimuthAngles',az, ... 'ElevationAngles',el,'RCSPattern',rcs);
Algorithms
The bicyclist consists of five primary components: bicycle frame and rider, pedals, rider legs, front wheel, and rear wheel. Each component contains many scatterers. All components move with a velocity determined by the specified speed and heading properties. In addition, the legs, pedals, and wheels undergo cyclical motion determined by the speed.
Scatterers on the frame and rider are fixed with respect to the bicyclist and move with the ego velocity
where v is the speed of the bicyclist specified by
the Speed property and H is the heading specified
by the InitialHeading property. These properties can be changed by
calling the move
function.
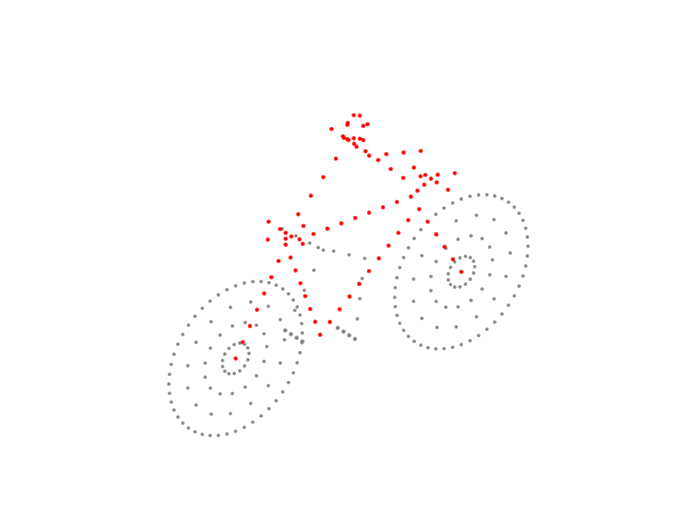
This figure shows the location of the scatterers on the bicycle frame and rider.
Scatterers on the pedals move with the bicyclist but can also revolve around the crank
spindle with a radius of rotation
Rped. There are two
possible motions of the pedals depending upon whether the bicycle is coasting
(freewheeling) or not coasting:
When the bicycle is coasting, the pedals do not revolve around the crank spindle and the velocity of the pedal scatterers equals the bicyclist velocity. Their positions relative to the bicyclist are fixed. Coasting is turned on by setting the
Coastproperty totrueor by setting thecoastargument of themoveobject function totrue. The speed of the pedal isWhen the bicycle is not coasting, the rider is pedaling. The angular velocity of the pedals is related to the angular velocity of the wheels by
where G is the gear ratio defined by the
GearTransmissionRatioproperty. The speed of a pedal scatterer equals the rotational speed of the pedal multiplied by the distance from pedal to crank spindle. The vector form of this relationship is:The velocity of the pedal with respect to the bicyclist is then
Coasting is turned off by setting the
Coastproperty tofalseor by setting thecoastargument of themoveobject function tofalse.
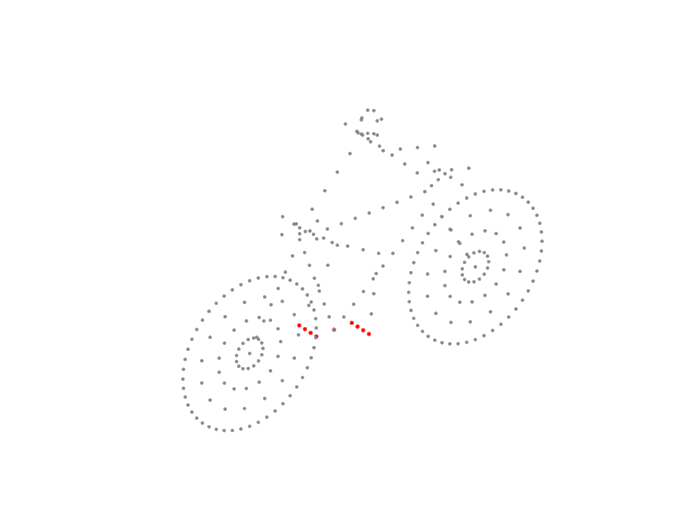
This figure shows the locations of the pedal scatterers.
Scatterers on the upper and lower legs of the rider move with the bicycle with an added cyclical motion. There are two possible motions of the legs depending upon whether the bicycle is coasting or not coasting:
When the bicycle is coasting, the legs are not moving with the respect to the bicycle and the scatterers move with the velocity of the bicyclist. Coasting is turned on by setting the
Coastproperty totrueor by setting thecoastargument of themoveobject function totrue.When the bicycle is not coasting, the upper and lower legs execute reciprocating motion. The upper legs partially rotate around the hip of the rider. The foot is attached to the pedal and rotates with the pedal. The knee connects the lower and upper legs. The locations of the foot and hips of the rider determine the locations of the knees and the motion of the scatterers on the legs.
Coasting is turned off by setting the
Coastproperty tofalseor by setting thecoastargument of themoveobject function tofalse.
This figure shows the locations of the scatterers on the upper and lower legs of the rider.
Scatterers are on the spokes and rims of the wheels and revolve around the wheel axle
at varying distances, rspk,
from the axle. The velocity of the scatterers in the bicyclist frame of reference is
The absolute velocity of a spoke or rim scatterer is
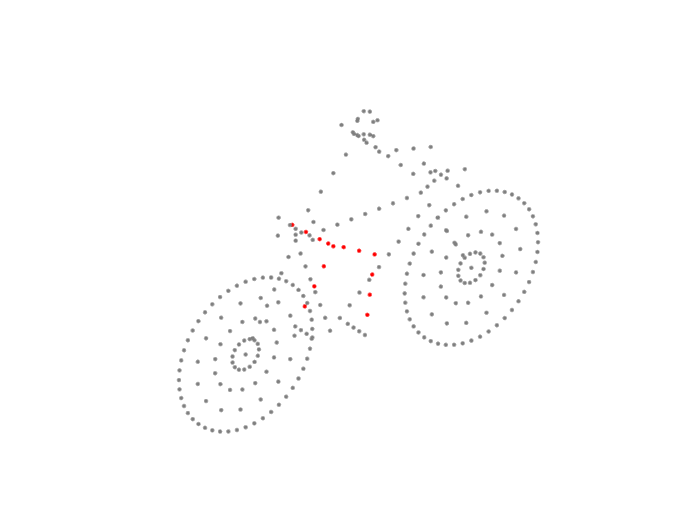
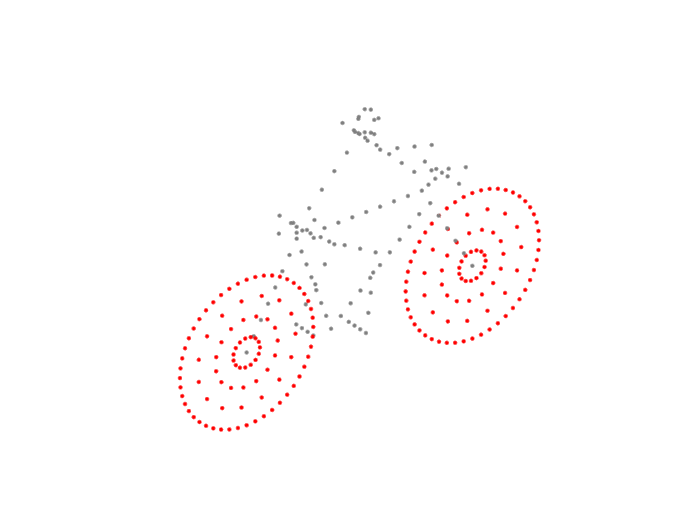
This figure shows the locations of the scatterers on the wheel rims and spokes.
References
[1] Stolz, M. et al. "Multi-Target Reflection Point Model of Cyclists for Automotive Radar." 2017 European Radar Conference (EURAD), Nuremberg, 2017, pp. 94–97.
[2] Chen, V., D. Tahmoush, and W. J. Miceli. Radar Micro-Doppler Signatures: Processing and Applications. The Institution of Engineering and Technology: London, 2014.
[3] Belgiovane, D., and C. C. Chen. "Bicycles and Human Rider Backscattering at 77 GHz for Automotive Radar." 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, 2016, pp. 1–5.
[4] Victor Chen, The Micro-Doppler Effect in Radar. Norwood, MA: Artech House, 2011.
Extended Capabilities
Version History
Introduced in R2021a