Train PG Agent with Custom Actor Network to Balance Discrete Cart-Pole
This example shows how to train a policy gradient (PG) agent to balance a discrete action space cart-pole system modeled in MATLAB®. For more information on PG agents, see REINFORCE Policy Gradient (PG) Agent.
For an example that trains a PG agent with a baseline and custom networks, see Train PG Agent with Custom Actor and Baseline Networks to Control Discrete Double Integrator.
The example code might involve computation of random numbers at several stages. Fixing the random number stream at the beginning of some sections in the example code preserves the random number sequence in the section every time you run it, which increases the likelihood of reproducing the results. For more information, see Results Reproducibility.
Fix Random Number Stream for Reproducibility
The example code might involve computation of random numbers at several stages. Fixing the random number stream at the beginning of some sections in the example code preserves the random number sequence in the section every time you run it, which increases the likelihood of reproducing the results. For more information, see Results Reproducibility.
Fix the random number stream with seed 0 and random number algorithm Mersenne Twister. For more information on controlling the seed used for random number generation, see rng.
previousRngState = rng(0,"twister");The output previousRngState is a structure that contains information about the previous state of the stream. You will restore the state at the end of the example.
Discrete Action Space Cart-Pole MATLAB Environment
The reinforcement learning environment for this example is a pole attached to an unactuated joint on a cart, which moves along a frictionless track. The training goal is to make the pendulum stand upright.
For this environment:
The balanced, upright pendulum position is
0radians, and the downward hanging pendulum position ispiradians.The pendulum starts upright with an initial angle between –0.05 and 0.05 radians.
The force action signal from the agent to the environment is either –10 or 10 N.
The observations from the environment are the position and velocity of the cart, the pendulum angle (clockwise-positive), and the pendulum angle derivative.
The episode terminates if the pole is more than 12 degrees from vertical or if the cart moves more than 2.4 m from the original position.
A reward of +1 is provided for every time step that the pole remains upright. A penalty of –5 is applied when the pendulum falls.
For more information on this model, see Use Predefined Control System Environments.
Create Environment Object
Create a predefined environment object for the pendulum.
env = rlPredefinedEnv("CartPole-Discrete")env =
CartPoleDiscreteAction with properties:
Gravity: 9.8000
MassCart: 1
MassPole: 0.1000
Length: 0.5000
MaxForce: 10
Ts: 0.0200
ThetaThresholdRadians: 0.2094
XThreshold: 2.4000
RewardForNotFalling: 1
PenaltyForFalling: -5
State: [4×1 double]
The object has a discrete action space where the agent can apply one of two possible force values to the cart, –10 or 10 N.
Obtain the observation and action information from the environment object.
obsInfo = getObservationInfo(env); actInfo = getActionInfo(env);
Create PG Agent with Custom Actor Network
For policy gradient agents, the actor executes a stochastic policy, which for discrete action spaces is approximated by a discrete categorical actor. This actor must take the observation signal as input and return a probability for each action.
As a simple parameterized policy is all you need to stabilize the pole on the cart, define a custom PG agent without any baseline. To implement the parameterized policy within the actor, use a simple neural network with just one hidden layer containing 10 neurons.
Define the network as an array of layer objects, and get the dimension of the observation space and the number of possible actions from the environment specification objects. When you create the network, the initial parameters are initialized with random values. Fix the random number stream so that the agent is always initialized with the same parameter values.
rng(0,"twister");
actorNet = [
featureInputLayer(prod(obsInfo.Dimension))
fullyConnectedLayer(10)
reluLayer
fullyConnectedLayer(numel(actInfo.Elements))
softmaxLayer
];For more information on creating a deep neural network policy representation, see Create Actors, Critics, and Policy Objects.
Convert to dlnetwork and display the number of weights.
actorNet = dlnetwork(actorNet); summary(actorNet)
Initialized: true
Number of learnables: 72
Inputs:
1 'input' 4 features
Create the actor representation using the specified deep neural network and the environment specification objects. For more information, see rlDiscreteCategoricalActor.
actor = rlDiscreteCategoricalActor(actorNet,obsInfo,actInfo);
To return the probability distribution of the possible actions as a function of a random observation, and given the current network weights, use evaluate.
prb = evaluate(actor,{rand(obsInfo.Dimension)});
prb{1}ans = 2×1 single column vector
0.7229
0.2771
Create the agent using the actor. For more information, see rlPGAgent.
agent = rlPGAgent(actor);
Check the agent with a random observation input.
getAction(agent,{rand(obsInfo.Dimension)})ans = 1×1 cell array
{[-10]}
Specify training options for the actor. Alternatively, you can use rlPGAgentOptions and rlOptimizerOptions objects.
For this training:
Specify the actor learning rate to be 5e-3. A large learning rate causes drastic updates which might lead to divergent behaviors, while a low value might require many updates before reaching the optimal point.
Use a gradient threshold of 1 to clip the gradients. Clipping the gradients can improve training stability.
agent.AgentOptions.ActorOptimizerOptions = ... rlOptimizerOptions(LearnRate=5e-3, ... GradientThreshold=1);
Train Agent
To train the agent, first specify the training options. For this example, use the following options.
Run each training episode for a maximum of 1000 episodes, with each episode lasting a maximum of 500 time steps.
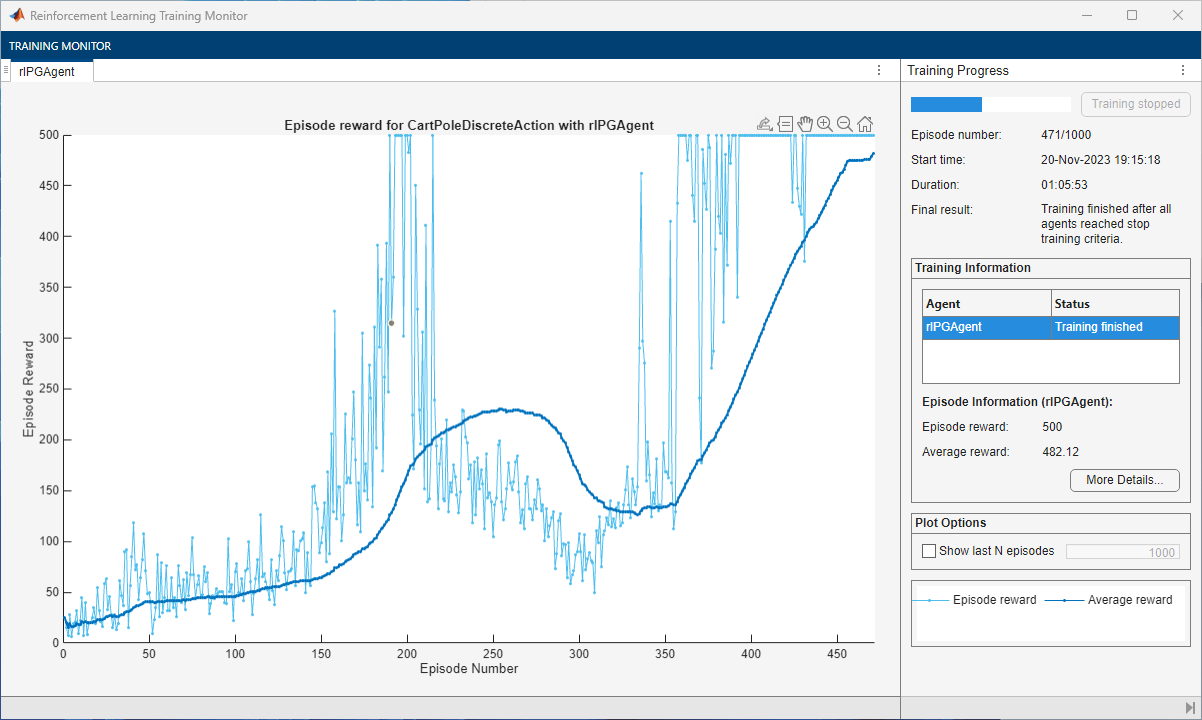
Display the training progress in the Reinforcement Learning Training Monitor dialog box (set the
Plotsoption) and disable the command line display (set theVerboseoption tofalse).Evaluate the performance of the greedy policy every 50 training episodes, averaging the cumulative reward of 10 simulations.
Stop the training when the evaluation score reaches 500. At this point, the agent can balance the cart-pole system in the upright position.
For more information on training options, see rlTrainingOptions.
% training options trainOpts = rlTrainingOptions( ... MaxEpisodes=1000, ... MaxStepsPerEpisode=500, ... Verbose=false, ... Plots="training-progress", ... StopTrainingCriteria="EvaluationStatistic", ... StopTrainingValue=500); % agent evaluator evl = rlEvaluator(EvaluationFrequency=50, NumEpisodes=10);
Fix the random stream for reproducibility.
rng(0,"twister");Train the agent using the train function. Training this agent is a computationally intensive process that takes several minutes to complete. To save time while running this example, load a pretrained agent by setting doTraining to false. To train the agent yourself, set doTraining to true.
doTraining =false; if doTraining % Train the agent. trainingStats = train(agent,env,trainOpts,Evaluator=evl); else % Load the pretrained agent for the example. load("MATLABCartpolePG.mat","agent"); end
The training converges after 650 episodes. You can simulate the trained agent in the environment.
Simulate PG Agent
Fix the random stream for reproducibility.
rng(0,"twister");You can visualize the cart-pole system by using the plot function.
plot(env)
Use a deterministic policy for simulation.
To validate the performance of the trained agent, simulate it within the cart-pole environment. For more information on agent simulation, see rlSimulationOptions and sim.
simOptions = rlSimulationOptions(MaxSteps=500); experience = sim(env,agent,simOptions);
The agent can balance the cart-pole system. Display the total reward obtained during the simulation.
totalReward = sum(experience.Reward)
totalReward = 500
Restore the random number stream using the information stored in previousRngState.
rng(previousRngState);
See Also
Apps
Functions
Objects
Topics
- Train PG Agent with Custom Actor and Baseline Networks to Control Discrete Double Integrator
- Train AC Agent to Balance Discrete Cart-Pole Using Parallel Computing
- Train Default PPO Agent for Discrete Lander Vehicle
- Use Predefined Control System Environments
- REINFORCE Policy Gradient (PG) Agent
- Create Actors, Critics, and Policy Objects
- Train Reinforcement Learning Agents