Mobile Robot Planning
Mapping, localization, path planning, path following
The algorithms listed in these categories can help you with the entire mobile robotics workflow from mapping to planning and control. You can create maps of environments using occupancy grids, develop path planning algorithms for robots in a given environment, and tune controllers to follow a set of waypoints. Perform state estimation based on lidar sensor data from your robot.
Categories
- Mapping and Localization
Lidar scan mapping, and particle filter localization
- Path Planning and Following
Path planning, and path following
Featured Examples

Path Planning in Environments of Different Complexity
Compute an obstacle-free path between two locations on a given map using the Probabilistic Roadmap path planner.
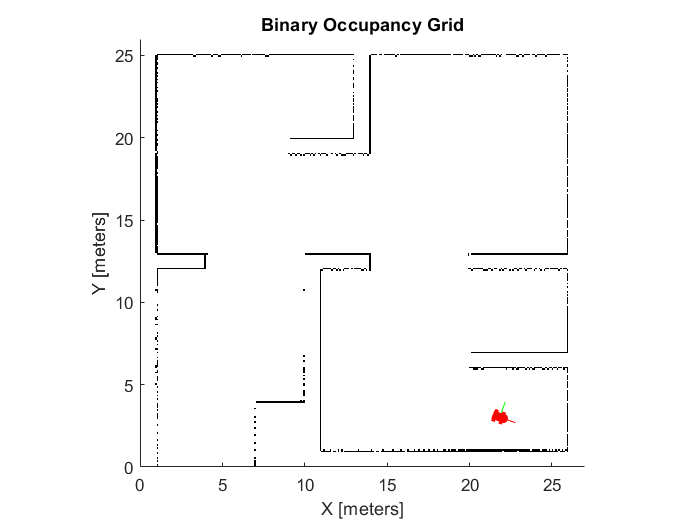
Mapping with Known Poses
Create a map of an environment using range sensor readings and robot poses to drive a differential drive robot.