Coordinate Transformation Conversion
Convert to a specified coordinate transformation representation
Libraries:
Robotics System Toolbox /
Utilities
Navigation Toolbox /
Utilities
ROS Toolbox /
Utilities
UAV Toolbox /
Utilities
Description
The Coordinate Transformation Conversion block converts a coordinate transformation from one representation to another. The Coordinate Transformation Conversion block can convert a single or multiple transformations. For a single transformation, the input and output transformations use these representations.
Vector representations:
Axis-Angle (
AxAng) —[x;y;z;theta]Euler Angles (
Eul) — Three-element vector[z;y;x]Quaternion (
Quat) —[w;x;y;z]Translation Vector (
TrVec) —[x;y;z]
Matrix representations:
Homogeneous Transformation (
TForm) — 4-by-4 matrixRotation Matrix (
RotM) — 3-by-3 matrix
For multiple transformations, the input and output transformations use these representations.
d-by-N matrix, where each column vector is a single transformation of length d. N is the number of transformations.
M-by-M-by-N array, where each M-by-M page of the array is a single transformation.
To accommodate representations that only contain position or orientation information
(TrVec or Eul, for example), you can specify
two inputs or outputs to handle all transformation information. When you select the
Homogeneous Transformation as an input or output, the optional Show TrVec
input port or Show TrVec output port parameters
can be selected on the block mask to toggle the multiple ports.
Examples
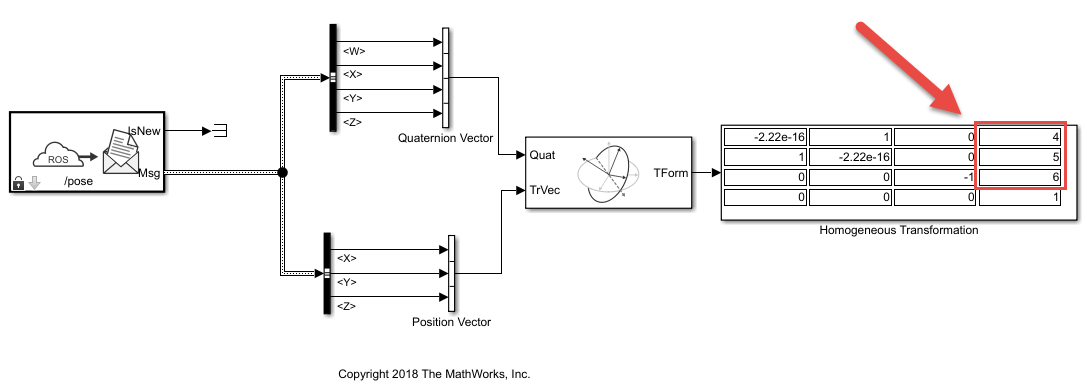
Convert a ROS Pose Message to a Homogeneous Transformation
This model subscribes to a Pose message on the ROS network and
converts it to a homogeneous transformation.
Ports
Input
Coordinate transformation, specified as a column vector, 3-by-3 matrix, 4-by-4 matrix, d-by-N matrix, or M-by-M-by-N array. You can specify single or multiple coordinate transformations. For a single coordinate transformation, the block supports these representations.
Vector representations:
Axis-Angle (
AxAng) —[x;y;z;theta]Euler Angles (
Eul) — Three-element vector[z;y;x]Quaternion (
Quat) —[w;x;y;z]Translation Vector (
TrVec) —[x;y;z]
Matrix representations:
Homogeneous Transformation (
TForm) — 4-by-4 matrixRotation Matrix (
RotM) — 3-by-3 matrix
For multiple coordinate transformations, the block supports these representations:
d-by-N matrix, where each column vector is a single transformation of length d. N is the number of transformations.
M-by-M-by-N array, where each M-by-M page of the array is a single transformation.
To accommodate representations that only contain position or
orientation information (TrVec or
Eul, for example), you can specify two inputs or
outputs to handle all transformation information. When you select the
Homogeneous Transformation as an input or output, the optional
Show TrVec input port or Show
TrVec output port parameters can be selected on the
block mask to toggle the multiple ports.
Translation vector, specified as a three element column vector or a
3-by-N matrix. N is the number
of transformations specified to the Input transformation
port. Each column is of the form [x;y;z] where
x, y, and z
specify a translation in the x-,
y-, and z- axes respectively. You
can use this port to input the translation information separately from
the rotation vector.
When specifying multiple transformations to the Input transformation port, specifying the TrVec input port as a vector applies the translation vector to all input transformations. Otherwise, the number of translations must match the number of rotations specified to the Input transformation port. Otherwise, an error occurs during simulation.
Dependencies
To enable this port, you must set the output
Representation parameter to
Homogeneous Transformation, the input
Representation parameter to any value
other than Homogeneous Transformation or
Translation Vector, and select Show
TrVec input port.
Output Arguments
Output transformation, returned as a column vector, 3-by-3 matrix, 4-by-4 matrix, d-by-N matrix, or M-by-M-by-N array. For each transformation specified to Input transformation, this port returns a transform with the representation specified by the output Representation parameter. If you specify N coordinate transformations to Input transformation, this port returns N coordinate transformations. For a single coordinate transformation, the following representations are supported.
Vector representations:
Axis-Angle (
AxAng) —[x;y;z;theta]Euler Angles (
Eul) — Three-element vector[z;y;x]Quaternion (
Quat) —[w;x;y;z]Translation Vector (
TrVec) —[x;y;z]
Matrix representations:
Homogeneous Transformation (
TForm) — 4-by-4 matrixRotation Matrix (
RotM) — 3-by-3 matrix
For multiple coordinate transformations, the block supports these representations:
d-by-N matrix, where each column vector is a single transformation of length d. N is the number of transformations.
M-by-M-by-N array, where each M-by-M page of the array is a single transformation.
To accommodate representations that only contain position or
orientation information (TrVec or
Eul, for example), you can specify two inputs or
outputs to handle all transformation information. When you select
Homogeneous Transformation as an input or output,
the optional Show TrVec input port or
Show TrVec output port parameters can be
selected on the block mask to toggle the multiple ports.
Translation vector, returned as a three element column vector or a
3-by-N matrix. N is the number
of transformations specified to the Input transformation
port. Each column is of the form where x-,
y-, and z- specify a
translation in the x, y, and
z axes respectively. You can use this port to
output the translation information separately from the rotation
vector.
Dependencies
To enable this port, you must set the input
Representation parameter to
Homogeneous Transformation, the output
Representation parameter to any value
other than Homogeneous Transformation or
Translation Vector, and select
Show TrVec output port.
Parameters
Input
Select the representation for the input port for the block. If you are using a transformation with only orientation information, you can also select the Show TrVec input port or Show TrVec output port when converting to or from a homogeneous transformation.
Order of the Euler angle axis rotations, specified as one of these string scalars:
ZYX(default)ZYZZXYZXZYXYYZXYXZYZYXYXXYZXZXXZY
The order of the angles in the input port
Eul must match this rotation sequence. Each
character indicates the corresponding axis. For example, if the sequence is
ZYX, then the three specified Euler angles are
interpreted in order as a rotation around the z-axis, a
rotation around the y-axis, and a rotation around the
x-axis. When applying this rotation to a point, it
will apply the axis rotations in the order x, then
y, then z.
Dependencies
You must select Euler Angles for the input
Representation parameter. The axis rotation
sequence only applies to Euler angle rotations.
Toggle the TrVec input port when you want to specify a separate translation vector for position information along with an orientation representation.
Dependencies
You must select Homogeneous Transformation for the
output Representation parameter to get the option
to show the additional TrVec input port. Enable the port by
clicking Show TrVec input port.
Output
Select the representation for the output port for the block. If you are using a transformation with only orientation information, you can also select the Show TrVec input port or Show TrVec output port when converting to or from a homogeneous transformation.
Order of the Euler angle axis rotations, specified as one of these string scalars:
ZYX(default)ZYZZXYZXZYXYYZXYXZYZYXYXXYZXZXXZY
The order of the angles in the output port
Eul must match this rotation sequence. Each
character indicates the corresponding axis. For example, if the sequence is
ZYX, then the three returned Euler angles are
interpreted in order as a rotation around the z-axis, a
rotation around the y-axis, and a rotation around the
x-axis. When applying this rotation to a point, it
will apply the axis rotations in the order x, then
y, then z.
Dependencies
You must select Euler Angles for the output
Representation parameter. The axis rotation
sequence only applies to Euler angle rotations.
Toggle the TrVec output port when you want to receive a separate translation vector for position information along with an orientation representation.
Dependencies
You must select Homogeneous Transformation for the
input Representation parameter to get the option
to show the additional TrVec output port. Enable the port
by clicking Show TrVec output port.
Interpreted execution— Simulate model using the MATLAB® interpreter. This option shortens startup time but has a slower simulation speed thanCode generation. In this mode, you can debug the source code of the block.Code generation— Simulate model using generated C code. The first time you run a simulation, Simulink® generates C code for the block. The C code is reused for subsequent simulations, as long as the model does not change. This option requires additional startup time, but the speed of the subsequent simulations is comparable toInterpreted execution.
Tunable: No
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2017bYou can now convert multiple coordinate transformations simultaneously to the specified output representation. Given N transformations, where each transformation is a d-element column vector, you can specify a d-by-N matrix to the Input transformation port. If each transformation is an M-by-M matrix, specify an M-by-M-by-N array, instead.
The Coordinate Transformation Conversion block supports additional Euler sequences for the Axis rotation sequence parameter. These are all the supported Euler sequences:
ZYXZYZZXYZXZYXYYZXYXZYZYXYXXYZXZXXZY
See Also
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Sélectionner un site web
Choisissez un site web pour accéder au contenu traduit dans votre langue (lorsqu'il est disponible) et voir les événements et les offres locales. D’après votre position, nous vous recommandons de sélectionner la région suivante : .
Vous pouvez également sélectionner un site web dans la liste suivante :
Comment optimiser les performances du site
Pour optimiser les performances du site, sélectionnez la région Chine (en chinois ou en anglais). Les sites de MathWorks pour les autres pays ne sont pas optimisés pour les visites provenant de votre région.
Amériques
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)