Read and Apply Transformation to ROS Message in Simulink
This example shows how to read transformations from a ROS network and use them to transform a pose message using Simulink®.
Publish Transformation and Pose Messages on ROS Network
Initialize the ROS network.
rosinit
Launching ROS Core... Done in 0.91617 seconds. Initializing ROS master on http://172.23.107.113:55450. Initializing global node /matlab_global_node_69076 with NodeURI http://dcc3700711glnxa64:37093/ and MasterURI http://localhost:55450.
Use the exampleHelperROSStartTfPublisher function to start publishing transformation data. The function publishes transformations between these frames:
robot_basecamera_centermounting_point
exampleHelperROSStartTfPublisher
Create a ROS publisher to publish pose messages.
[posePub,poseMsg] = rospublisher("/pose","geometry_msgs/PoseStamped",DataFormat="struct");
Create and publish the pose message.
poseMsg.Pose.Position.X = 1; poseMsg.Pose.Position.Y = 1; poseMsg.Pose.Position.Z = 0.5; send(posePub,poseMsg)
Read and Apply Transformation
Open the readAndApplyROSTransform model. The Get Transform block reads the transformation between the target robot_base and the source camera_center frames as a geometry_msgs/TransformStamped bus. The Header Assignment block assigns the frame ID camera_center to the pose message. Then, the Apply Transform block transforms the pose message using the read transformation value. The model then writes the transformed pose message into MATLAB® workspace.
modelName = "readAndApplyROSTransform";
open_system(modelName)![]()
The readAndApplyROSTransform model uses Simulation Pacing to run at a pace where the simulation time is same as the wall clock time. This is important to ensure that Simulink synchronizes correctly with the transforms being published to the transformation tree in the ROS network.
Simulate the model.
out = sim(modelName);
Visualize Input and Transformed Poses
Get transformed pose as geometry_msgs/Pose message from the simulation output variable in the workspace.
transformedPoseMsg = helperGetTransformedROSPoseFromSimout(out);
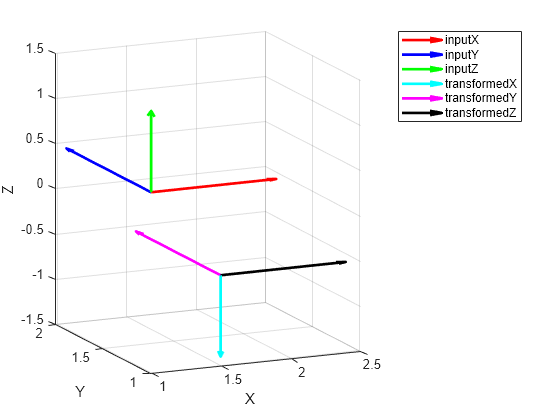
You can visualize poses as local coordinate frames in the global cartesian coordinates. You can calculate the location and basis axes orientation of the local frames by using the position and orientation information in the poses, respectively. For both input and transformed poses, use the helperGetTransformedAxesVectorsFromROSQuat function to get the basis vectors of the local coordinate frame.
[inputPoseX,inputPoseY,inputPoseZ] = helperGetTransformedAxesVectorsFromROSQuat(poseMsg.Pose.Orientation); [transformedPoseX,transformedPoseY,transformedPoseZ] = helperGetTransformedAxesVectorsFromROSQuat(transformedPoseMsg.Pose.Orientation);
Visualize the poses as local coordinate frames based on the position and orientation values. The quiver3 function visualizes the basis vectors at the specified pose location.
quiver3(poseMsg.Pose.Position.X,poseMsg.Pose.Position.Y,poseMsg.Pose.Position.Z,inputPoseX(1),inputPoseX(2),inputPoseX(3),'r',LineWidth=2) hold on quiver3(poseMsg.Pose.Position.X,poseMsg.Pose.Position.Y,poseMsg.Pose.Position.Z,inputPoseY(1),inputPoseY(2),inputPoseY(3),'b',LineWidth=2) quiver3(poseMsg.Pose.Position.X,poseMsg.Pose.Position.Y,poseMsg.Pose.Position.Z,inputPoseZ(1),inputPoseZ(2),inputPoseZ(3),'g',LineWidth=2) quiver3(transformedPoseMsg.Pose.Position.X,transformedPoseMsg.Pose.Position.Y,transformedPoseMsg.Pose.Position.Z,transformedPoseX(1),transformedPoseX(2),transformedPoseX(3),'c',LineWidth=2) quiver3(transformedPoseMsg.Pose.Position.X,transformedPoseMsg.Pose.Position.Y,transformedPoseMsg.Pose.Position.Z,transformedPoseY(1),transformedPoseY(2),transformedPoseY(3),'m',LineWidth=2) quiver3(transformedPoseMsg.Pose.Position.X,transformedPoseMsg.Pose.Position.Y,transformedPoseMsg.Pose.Position.Z,transformedPoseZ(1),transformedPoseZ(2),transformedPoseZ(3),'k',LineWidth=2) legend("inputX","inputY","inputZ","transformedX","transformedY","transformedZ") xlabel('X') ylabel('Y') zlabel('Z') view([-24.39 11.31])
Shut down the ROS network.
rosshutdown
Shutting down global node /matlab_global_node_69076 with NodeURI http://dcc3700711glnxa64:37093/ and MasterURI http://localhost:55450. Shutting down ROS master on http://172.23.107.113:55450.