tf2zp
Convert transfer function filter parameters to zero-pole-gain form
Syntax
Description
[
finds the matrix of zeros z,p,k] = tf2zp(b,a)z, the vector of poles
p, and the associated vector of gains k from the
transfer function parameters b and a. The function
converts a polynomial transfer-function representation
of a single-input/multi-output (SIMO) continuous-time system to a factored transfer function form
Note
Use tf2zp when working with powers of s, such as in continuous-time transfer functions. A similar function,
tf2zpk, is more useful when working with
transfer functions expressed in powers of z–1.
Examples
Generate a system with the following transfer function.
Find the zeros, poles, and gain of the system. Use eqtflength to ensure the numerator and denominator have the same length.
b = [2 3]; a = [1 1/sqrt(2) 1/4]; [b,a] = eqtflength(b,a); [z,p,k] = tf2zp(b,a)
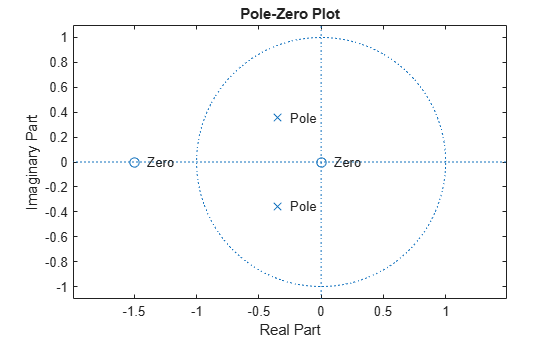
z = 2×1
0
-1.5000
p = 2×1 complex
-0.3536 + 0.3536i
-0.3536 - 0.3536i
k = 2
Plot the poles and zeros to verify that they are in the expected locations.
zplane(b,a) text(real(z)+0.1,imag(z),"Zero") text(real(p)+0.1,imag(p),"Pole")
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced before R2006a