Évaluer les performances d’un moteur DC
Cet exemple montre comment simuler des systèmes qui couvrent des domaines électriques et mécaniques. Découvrez comment modéliser des composants physiques avec des blocs Simscape™, à les connecter à un modèle réaliste, à utiliser également des blocs Simulink®, puis à simuler et modifier un modèle de moteur.
Le modèle est basé sur un micromoteur DC de la gamme Faulhaber 0615. Le modèle utilise des paramètres de circuit équivalents pour le moteur de 1,5 V afin de vérifier la vitesse à vide, le courant à vide et le couple de calage indiqués par le fabricant. Vous pouvez utiliser le modèle pour évaluer les performances du moteur dans une application donnée en ajoutant le modèle de charge mécanique requis.
Explorer le modèle
Ouvrez l'exemple de modèle de Moteur DC à aimants permanents. À l’invite de commande MATLAB®, saisissez :
openExample('simscape/PermanentMagnetDCMotorExample')Modèle principal
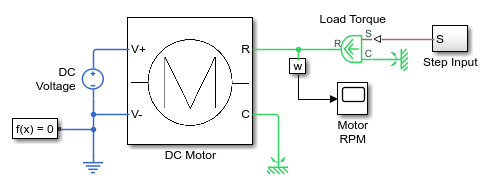
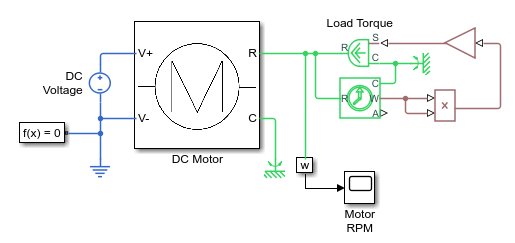
Le modèle contient un sous-système DC Motor avec deux ports électriques et deux ports mécaniques de rotation.
Pour une meilleure lisibilité des schémas blocs, chaque domaine Simscape utilise une couleur et un style de ligne distincts par défaut pour les lignes de connexion. Dans ce schéma bloc, par exemple, le circuit électrique est indiqué par la couleur bleu foncé des lignes de connexion, tandis que les lignes de connexion entre les ports mécaniques de rotation sont vert clair. Les lignes de signal physique sont marron.
Les ports électriques du moteur se connectent au circuit électrique, qui se compose d’un bloc Electrical Reference, représentant une masse électrique et une source de tension de 1,5 V DC.
D'un point de vue mécanique, un bloc Mechanical Rotational Reference représente un point de référence pour les autres éléments.
La charge du moteur est représentée par le bloc appelé Load Torque, qui est un bloc Ideal Torque Source. D’un côté, il est connecté à un bloc Mechanical Rotational Reference et de l’autre côté à l’arbre du moteur. Le couple de charge est spécifié par le sous-système Step Input connecté via un signal physique au port de contrôle S du bloc Load Torque.
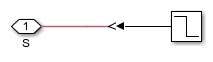
Le sous-système Step Input contient une source Simulink Step standard, qui fournit le signal de contrôle. Un bloc Simulink-PS Converter convertit le signal de contrôle en signal physique et l’applique au port de contrôle du bloc Load Torque via le bloc Connection Port S.
Le schéma contient également un bloc Solver Configuration, qui est requis dans n’importe quel modèle Simscape. Il contient des paramètres relatifs aux algorithmes numériques pour les simulations Simscape.
Double-cliquez sur le sous-système DC Motor pour l’ouvrir.
Sous-système DC Motor
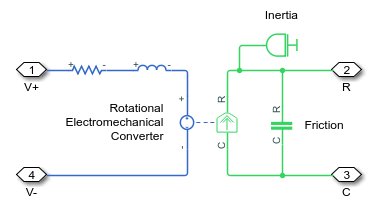
Le moteur se compose d’un circuit électrique et d’un circuit mécanique de rotation, reliés par le bloc Rotational Electromechanical Converter. Le circuit électrique se compose d’un bloc Resistor et d’un bloc Inductor. Il contient deux ports électriques correspondant aux bornes électriques V+ et V- du moteur. Le circuit mécanique contient un bloc Rotational Friction, un bloc Inertia et deux ports mécaniques de rotation C et R correspondant respectivement au carter du moteur et au rotor. Notez comment les ports C et R du bloc Rotational Friction et du bloc Rotational Electromechanical Converter sont connectés aux ports C et R du moteur pour conserver la bonne direction des variables dans le réseau physique.
Exécuter le modèle
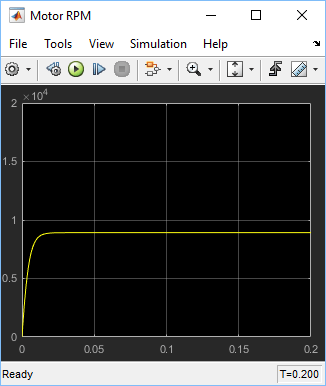
Double-cliquez sur le Scope du Motor RPM pour l’ouvrir. Pendant la simulation, cette fenêtre affiche la vitesse de l’arbre en fonction du temps.
Cliquez sur
 pour démarrer la simulation. Le solveur Simscape évalue le modèle, calcule les conditions initiales et exécute la simulation. Ce processus peut prendre quelques secondes. Le message dans le coin inférieur gauche de la fenêtre du modèle indique l’état.
pour démarrer la simulation. Le solveur Simscape évalue le modèle, calcule les conditions initiales et exécute la simulation. Ce processus peut prendre quelques secondes. Le message dans le coin inférieur gauche de la fenêtre du modèle indique l’état.Examinez les résultats de simulation dans la fenêtre Scope du Motor RPM.
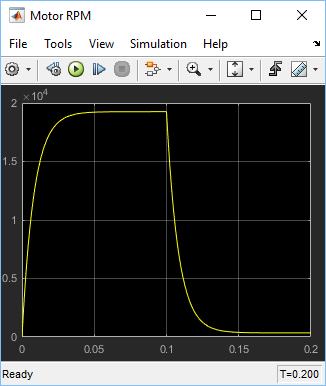
Pendant la 0,1 première seconde, le moteur n’a pas de charge externe et la vitesse s’accumule jusqu’à la valeur à vide. Ensuite, à 0,1 seconde, le couple de calage est appliqué sous forme de charge à l’arbre du moteur. Un zoom avant sur le Scope du Motor RPM indique que le modèle correspond aux paramètres du fabricant pour la vitesse à vide et le couple de calage.
L’exemple de modèle montre également comment vous pouvez utiliser le code MATLAB pour analyser les résultats de simulation. Pour tracer le courant et le couple de charge, cliquez sur le lien hypertexte
Plotdans l’annotation du modèle. Le courant indiqué dans la figure correspond aux paramètres du fabricant pour le courant à vide.
Modifier la tension d’alimentation
Réduisez la tension d’alimentation à 1,25 V (pour simuler le fonctionnement de la batterie) et faites varier le couple de charge pour trouver le couple maximum à cette tension réduite.
Double-cliquez sur le bloc DC Voltage Source. Définissez Constant voltage à
1.25 V.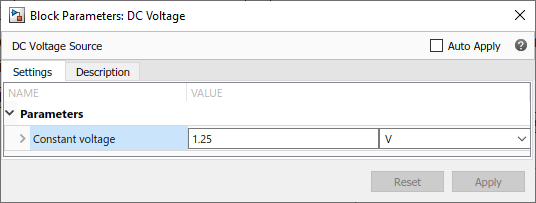
Exécutez la simulation. Notez l’effet de la tension réduite sur la vitesse à vide.

Essayez de faire varier le couple de charge pour trouver le couple maximum à cette tension réduite. Ouvrez le sous-système Step Input et double-cliquez sur le bloc Step source. Saisissez des valeurs finales différentes pour le signal d’entrée et réexécutez la simulation.
L’illustration suivante montre les résultats de simulation pour le paramètre Final value défini sur
-0.2e-3, qui correspond à(1.25/1.5)*0.24mNm, car l’amplitude de la courbe couple-vitesse est proportionnelle à la tension d’un moteur DC.
Modifier la charge du moteur
Remplacez la source de couple par une charge mécanique simple, par exemple un ventilateur, pour lequel le couple est défini par alpha*speed^2, où alpha est -1e-10 Nm/(rad/s)^2.
Supprimez le sous-système Step Input du modèle.
Dans la bibliothèque de blocs Simscape, ouvrez Foundation Library > Mechanical > Mechanical Sensors.
Faites glisser le bloc Ideal Rotational Motion Sensor dans la fenêtre du modèle.
Ouvrez Foundation Library > Physical Signals > Functions.
Faites glisser le bloc PS Product et le bloc PS Gain dans la fenêtre du modèle.
Connectez les blocs comme indiqué dans l’illustration suivante. Pour faire pivoter un bloc, sélectionnez-le et appuyez sur Ctrl + R.
Double-cliquez sur le bloc PS Gain. Dans la première zone d’édition en regard du paramètre Gain, saisissez la valeur
-1e-10. Dans la deuxième zone d'édition composée d'une liste déroulante pour les unités, saisissez l’expression d’unitéN*m/(rad/s)^2, puis cliquez sur Apply.Exécutez la simulation et évaluez les performances du moteur avec la nouvelle charge.