Force Sensor (PB)

Libraries:
Simscape /
Foundation Library /
Translational /
Sensors
Description
The Force Sensor (PB) block measures force in a position-based translational network. The sensor represents a rigid load cell. There is no position or velocity change across the sensor. The length of the sensor is 0 m.
Connections B and F are position-based translational conserving ports. The physical signal port f outputs the force applied in the direction from port B to port F.
Connect this sensor in series with the block where you want to measure the force, because force is a Through variable. For more information, see Through and Across Variables.
The Force Sensor (PB) block positive direction is from port B to port F. When you align the sensor positive direction with the network positive direction, then:
A positive output signal indicates that the measured point in the network is in a state of compression.
A negative output signal indicates that the measured point in the network is in a state of tension.
Alternatively, if the sensor positive direction is opposite of the network positive direction, then a positive output signal indicates that the network is in a state of tension and a negative output signal indicates that the network is in a state of compression.
Examples
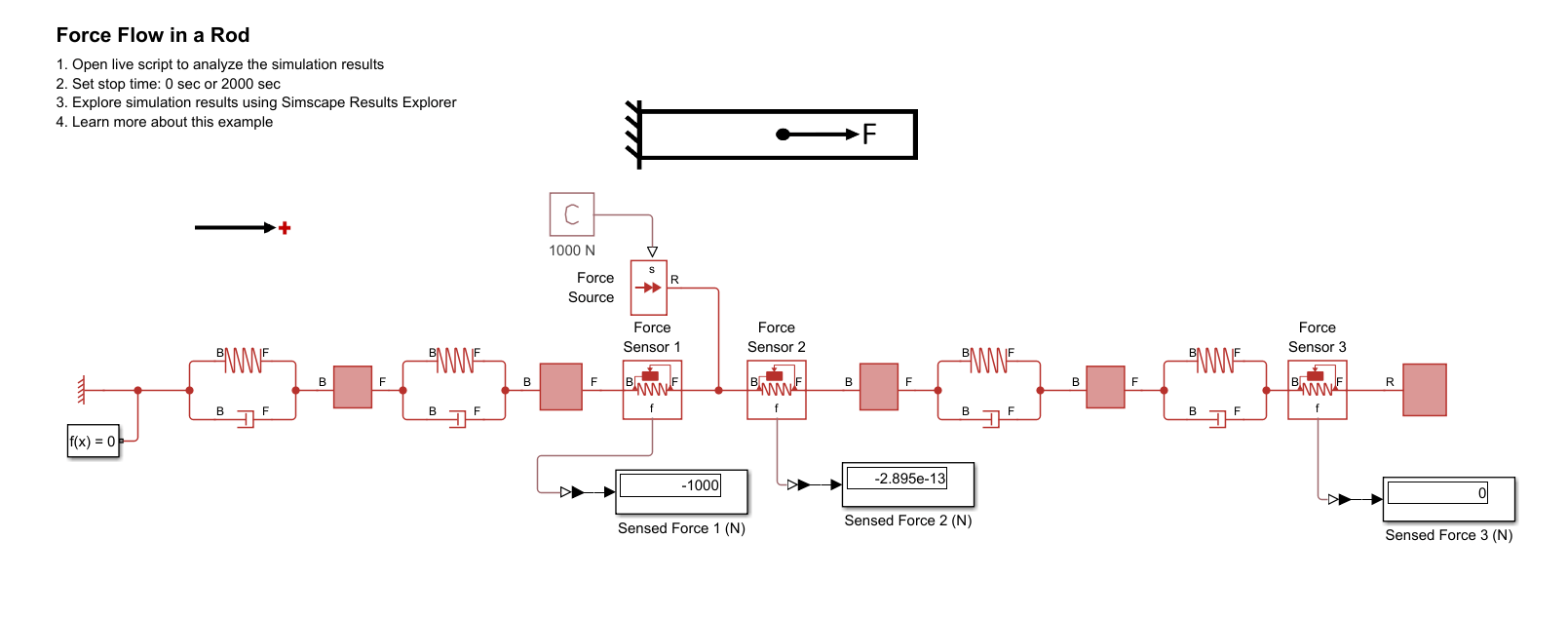
Force Flow in the Position-Based Translational Domain
Describes how to interpret forces in a Simscape™ mechanical position-based translational network. The example summarizes rules for interpreting the signs of logged forces and then considers forces in three types of systems: springs being pulled or pushed from different ends, simple systems with external forces applied at a mid-point, and a more complex system with an external force applied at the mid-point.
Ports
Output
Conserving
Extended Capabilities
Version History
Introduced in R2024b