La traduction de cette page n'est pas à jour. Cliquez ici pour voir la dernière version en anglais.
Explorer la hiérarchie du modèle
Les modèles Simulink® peuvent être organisés en composants hiérarchiques. Dans un modèle hiérarchique, vous pouvez choisir de visualiser le système à un niveau élevé ou de parcourir la hiérarchie du modèle pour voir des niveaux croissants de détail du modèle.
Visualiser la hiérarchie du modèle
Pour commencer, ouvrez le modèle smart_braking.
Dans le modèle :
Un véhicule se déplace lorsque la pédale d'accélérateur est enfoncée.
Un capteur de proximité mesure la distance entre le véhicule et un obstacle.
Un système d'alerte génère une alarme en fonction de cette proximité.
L'alarme contrôle automatiquement le frein pour éviter une collision.
Lorsque vous créez un modèle, vous connectez des blocs ensemble pour modéliser des composants complexes qui représentent la dynamique du système. Dans ce modèle, Vehicle, Proximity sensor, et Alert system sont tous des composants complexes comportant plusieurs blocs qui existent dans une hiérarchie de sous-systèmes. Pour visualiser le contenu d'un sous-système, double-cliquez sur le sous-système.
Pour visualiser une représentation de la hiérarchie complète du modèle, ouvrez le Model Browser.
Élargissez verticalement la fenêtre du modèle jusqu'à ce que le bouton « Hide/Show Model Browser » soit visible dans le coin inférieur gauche de l'éditeur Simulink.
Cliquez sur le bouton « Hide/Show Model Browser ».

Le Model Browser montre que tous les sous-systèmes que vous visualisez au niveau supérieur disposent de leurs propres sous-systèmes. Développez chaque nœud de sous-système pour voir les sous-systèmes qu'il contient. Vous pouvez parcourir la hiérarchie dans le Model Browser. Par exemple, développez le nœud Proximity sensor, puis sélectionnez le sous-système Sensor model.

La barre d'adresse indique le sous-système que vous visualisez. Pour ouvrir le sous-système dans une fenêtre distincte, faites un clic droit sur le sous-système et sélectionnez Open In New Window.
Chaque port d'entrée ou de sortie d'un sous-système dispose d'un bloc Inport ou Outport correspondant dans le même sous-système. Ces blocs représentent le transfert de données entre un sous-système et son parent. Lorsqu'un système contient plusieurs ports d'entrée ou de sortie, le numéro figurant sur les blocs Inport ou Outport indique la position du port sur l'interface du sous-système.
Visualiser les attributs des signaux
Les lignes de signaux dans Simulink indiquent les transferts de données d'un bloc à l'autre. Les signaux disposent de propriétés correspondant à leur fonction dans le modèle :
Dimensions — Scalaires, vectorielles ou matricielles
Type de données — Chaîne, double, entier non signé, etc.
Pas d’échantillonnage — Intervalle de temps fixe pendant lequel le signal a une valeur mise à jour (ou
0pour un échantillonnage continu)
Pour afficher le type de données de tous les signaux d'un modèle, dans l'onglet Debug, sous Information Overlays, cliquez sur Base Data Types.

Le modèle affiche les types de données le long des lignes des signaux. La plupart des signaux sont en double précision, à l'exception de la sortie du sous-système Alert system. Double-cliquez sur le sous-système pour l'examiner.

Les étiquettes de type de données de ce sous-système indiquent que le changement de type de données se produit dans le sous-système Alert device. Double-cliquez sur le sous-système pour l'examiner.

Le composant Alert device convertit le signal Alert index de double précision à entier. Vous pouvez définir le type de données dans les blocs Sources ou utiliser un bloc Data Type Conversion de la bibliothèque Signal Attributes. Double, le type de données par défaut, fournit la meilleure précision numérique et est supporté dans tous les blocs. Le type de données double utilise également le plus de mémoire et de puissance de calcul. D'autres types de données numériques peuvent être utilisés pour modéliser des systèmes embarqués où la mémoire et la puissance de calcul sont limitées.
Pour afficher les pas d'échantillonnage, dans l'onglet Debug, sous Information Overlays, cliquez sur Colors dans la section Sample Time. Le modèle est mis à jour de façon à afficher différentes couleurs pour chaque pas d'échantillonnage dans le modèle, ainsi qu'une légende.

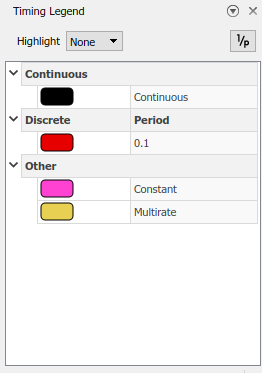
Un bloc ou un signal avec une dynamique continue est noir. Les signaux avec un pas d'échantillonnage continu sont mis à jour aussi souvent que l'exige le solveur pour respecter les valeurs de tolérance spécifiées.
Un bloc ou un signal constant est magenta. Ils restent inchangés pendant la simulation.
Un bloc ou un signal discret mis à jour à l'intervalle fixe le plus bas est rouge. Les signaux à pas d'échantillonnage discret sont mis à jour à un intervalle fixe. Si le modèle contient des composants à pas d'échantillonnage fixes différents, chaque pas d'échantillonnage discret a une couleur différente.
Les sous-systèmes à échantillonnage multiple, qui contiennent une combinaison de signaux discrets et continus, sont jaunes.
Tracer un signal
Ce modèle dispose d'une entrée constante et d'une sortie discrète. Pour déterminer l'endroit où le schéma d'échantillonnage change, tracez le signal de sortie à travers ses blocs sources.
Pour ouvrir le Model Browser, élargissez verticalement la fenêtre du modèle jusqu'à ce que le bouton « Hide/Show Model Browser »
 soit visible dans le coin inférieur gauche de l'éditeur Simulink. Cliquez ensuite sur le bouton « Hide/Show Model Browser ».
soit visible dans le coin inférieur gauche de l'éditeur Simulink. Cliquez ensuite sur le bouton « Hide/Show Model Browser ».Pour tracer les sources du signal de sortie, sélectionnez d'abord le signal. Ensuite, dans l'onglet Signal, cliquez sur Trace to Source
 .
.L'éditeur Simulink passe en mode traçage du signal. Dans ce mode, le canevas du modèle devient gris au lieu de blanc pour faciliter la mise en évidence du chemin.
Le panneau de conseils (hints) affiche les actions possibles lorsque vous êtes en mode traçage de signal ainsi que les raccourcis clavier correspondants. Pour réduire le panneau de conseils, appuyez sur la touche ? du clavier. Pour le rétablir, appuyez à nouveau sur ?.

Pour continuer à tracer les sources du signal de sortie, appuyez sur la flèche vers la gauche.

Continuez à appuyer sur la flèche vers la gauche pour tracer les sources du signal de sortie jusqu'au bloc Subtract du sous-système
Alert logic. Une fois que vous atteignez le bloc Subtract dans le chemin du signal, vous devez choisir un chemin pour poursuivre le traçage car le bloc Subtract a deux ports d'entrée. Le software met en surbrillance le prochain segment à tracer en bleu pour indiquer le chemin sélectionné. Par défaut, le premier port d'entrée est sélectionné pour la suite du traçage. Sélectionnez le chemin passant par le port d'entrée négatif en appuyant sur la flèche vers le bas.
Pour trouver la source de la discrétisation, continuez à appuyer sur la flèche vers la gauche et notez la couleur du nom de chaque port, qui correspond à son pas d'échantillonnage.
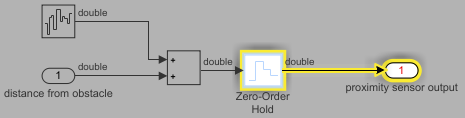
Le bloc Zero-Order Hold du sous-système Sensor model convertit le signal continu en signal discret.