Pendule inversé avec animation
Cet exemple montre comment utiliser Simulink® pour modéliser et animer un système de pendule inversé. Un pendule inversé a son centre de masse au-dessus de son point de pivot. Pour maintenir la stabilité de cette position, le système implémente une logique de contrôle pour déplacer le point de pivot au-dessous du centre de masse quand le pendule commence à tomber. Le pendule inversé est un problème de dynamique classique utilisé pour tester les stratégies de contrôle.
Système
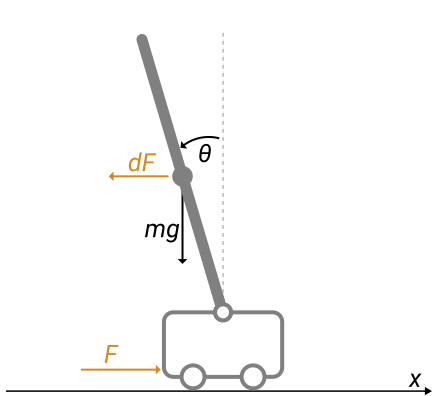
Dans cet exemple, le système se compose d’un pendule inversé monté sur un chariot mobile. Le modèle limite le mouvement au plan vertical. Pour maintenir la stabilité du système, le modèle implémente un système d’asservissement d’état pour pister la position du chariot. Pour savoir comment les équations sont dérivées et implémentées dans Simulink, consultez Derive Equations of Motion and Simulate Cart-Pole System (Symbolic Math Toolbox).

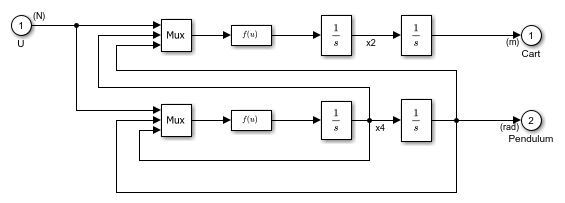
Dynamique de pendule inversé
Le modèle utilise un sous-système masqué pour implémenter la dynamique de système non linéaire du pendule inversé. Le sous-système détermine la position du chariot sur l’axe x et la rotation du pendule autour du point de pivot.
Système d’asservissement d’état
Le modèle implémente le système d’asservissement d’état pour pister la position du chariot et maintenir le point de pivot en dessous du centre de masse du pendule. Le sous-système Kalman filter est utilisé pour estimer les états internes du système.
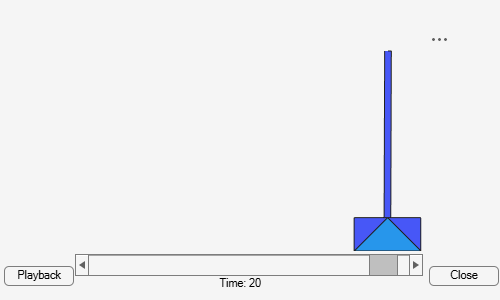
Animation et analyse
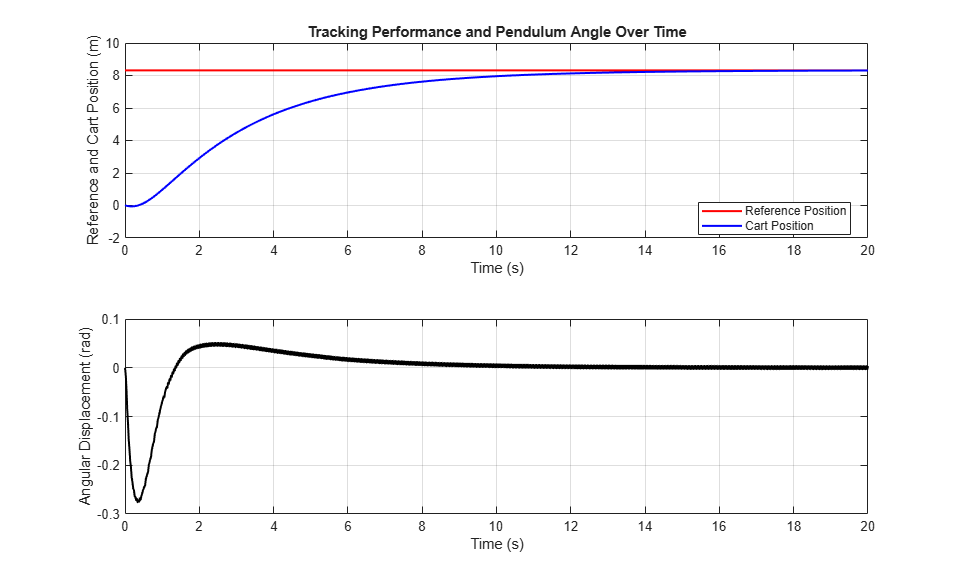
Le modèle utilise un bloc de S-function MATLAB de niveau 2 pour implémenter l’animation. La S-function utilise MATLAB® Handle Graphics®. Pour afficher la S-function, ouvrez pendan.m. Dans la fenêtre « Pendulum Animation », utilisez la barre de curseur pour déplacer le point de pivot du pendule sur le chariot. Pour maintenir la stabilité du système, le modèle implémente un système d’asservissement d’état basé sur un observateur. La figure ci-dessous illustre la réponse du système de pendule inversé dans le domaine temporel. Le premier sous-tracé compare la position de référence à la position réelle du chariot, mettant en évidence la performance de pistage au fil du temps. Le second sous-tracé décrit le déplacement angulaire du pendule en radians, indiquant l’évolution de l’angle du pendule pendant le processus de contrôle. Vous pouvez également utiliser le Simulation Data Inspector pour examiner les données enregistrées.
Voir aussi
Level-2 MATLAB S-Function | Discrete PID Controller | Signal Generator
Rubriques
- Add App Designer App to Inverted Pendulum Model (Simulink Real-Time)
- Derive Equations of Motion and Simulate Cart-Pole System (Symbolic Math Toolbox)
- Control of Inverted Pendulum on Cart (Control System Toolbox)
- Inverted Pendulum Controller Tuning (Simulink Design Optimization)
- Masking Fundamentals
- Save Signal Data Using Signal Logging
- Unit Specification in Simulink Models