Programming Constructs in Simulink
Simulink command – MATLAB® command that is specific to Simulink®modeling or simulation. Enter Simulink
commands in the MATLAB Command Window or use
in MATLAB scripts for testing a model
programmatically. The following commands set simulation parameters, run a
simulation, and saves the simulation results. In the first statement,
sim is a Simulink
command for running a simulation.
simOut = sim('cruise_control','SimulationMode','normal',...
'AbsTol','1e-5','SaveState','on',...
'StateSaveName','xout','SaveOutput','on',...
'OutputSaveName','yout','SaveFormat', 'Dataset');
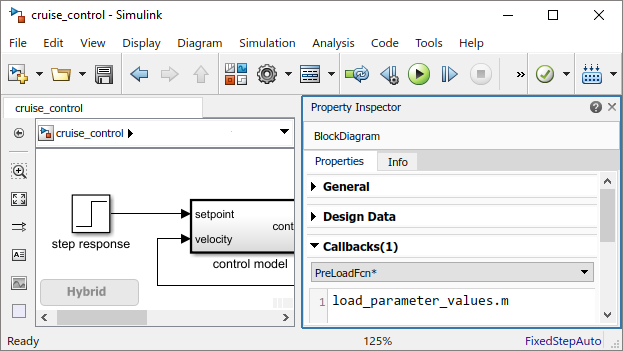
outputs = simOut.get('yout')callback, model callback – MATLAB code that executes in response to a specific model or block action. To add a model callback, in the Modeling tab, under Design, click Property Inspector, then in the Properties tab, select a function from the Callbacks list, and then enter MATLAB code or the name of a MATLAB script.
In the following example, when Simulink loads a model it also loads a file into the MATLAB workspace with parameters values for the model.
Simulink function – Computational unit that calculates a set of outputs when provided with a set of inputs. A common text interface between function caller and function definition allows various definition formats using a Simulink Function block, exported Stateflow graphical function, or exported Stateflow MATLAB function.
MATLAB Function –
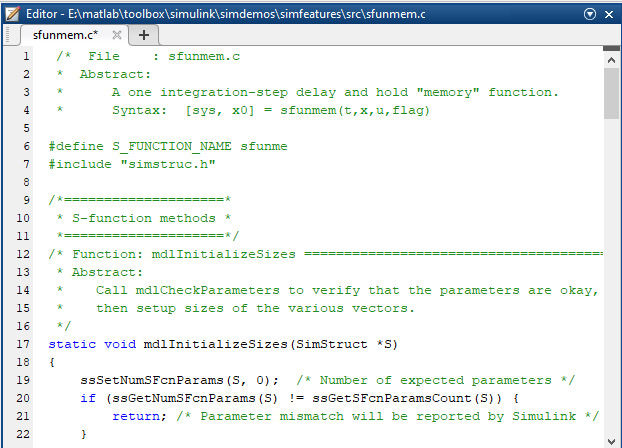
S-function, system-function – Computer language description
of a Simulink
S-Function block written in MATLAB code, C, C++, or Fortran. C, C++, and
Fortran S-functions are compiled as MEX files using the MATLAB
mex utility.