Switch Between Sets of Parameter Values During Simulation and Code Execution
To store multiple independent sets of values for the same block parameters, you can use an array of structures. To switch between the parameter sets, create a variable that acts as an index into the array, and change the value of the variable. You can change the value of the variable during simulation and, if the variable is tunable, during execution of the generated code.
A better way to implement varying sets of values for a block parameter is to use Variant Parameters (Simulink.VariantVariable). For an example that uses this workflow, see Create a Simple Variant Parameter Model. Use variant parameter banks (Simulink.VariantBank) to group variant parameters into a structure array in the generated code. Variant parameter banks use pointer switching in the code to switch the set of active parameter values based on variant conditions.
Explore Example Model
Open the example model.
open_system('sldemo_fuelsys_dd_controller')
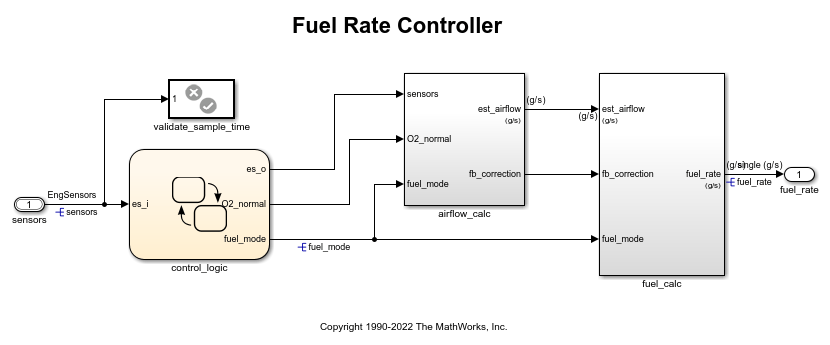
This model represents the fueling system of a gasoline engine. The output of the model is the rate of fuel flow to the engine.
Navigate to the switchable_compensation nested subsystem.
open_system(['sldemo_fuelsys_dd_controller/fuel_calc/',... 'switchable_compensation'])
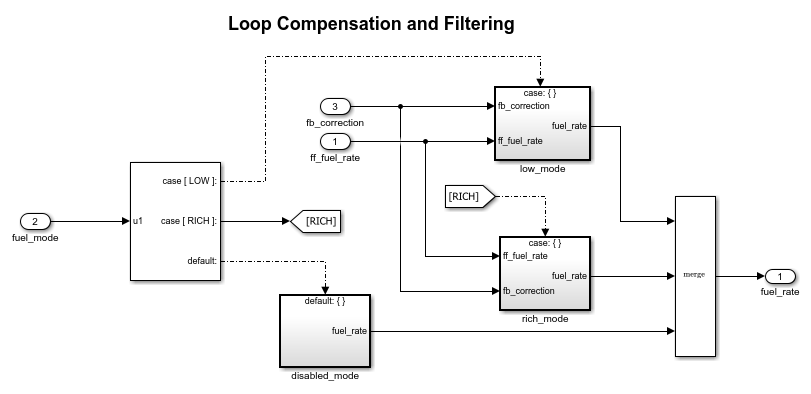
This subsystem corrects and filters noise out of the fuel rate signal. The subsystem uses different filter coefficients based on the fueling mode, which the control logic changes based on sensor failures in the engine. For example, the control algorithm activates the low_mode subsystem during normal operation. It activates the rich_mode subsystem in response to sensor failure.
Open the low_mode subsystem.
open_system(['sldemo_fuelsys_dd_controller/fuel_calc/',... 'switchable_compensation/low_mode'])
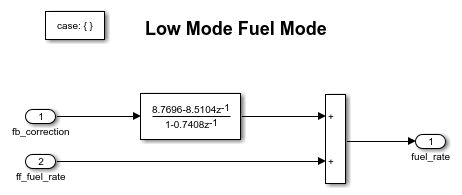
The Discrete Filter block filters the fuel rate signal. In the block dialog box, the Numerator parameter sets the numerator coefficients of the filter.
The sibling subsystem rich_mode also contains a Discrete Filter block, which uses different coefficients.
Update the model diagram to display the signal data types. The input and output signals of the block use the single-precision, floating-point data type single.
In the lower-left corner of the model, click the model data badge, then click the Data Dictionary link. The data dictionary for this model, sldemo_fuelsys_dd_controller.sldd, opens in the Model Explorer.
In the Model Explorer Model Hierarchy pane, select the Design Data node.
In the Contents pane, view the properties of the Simulink.NumericType objects, such as s16En15. All of these objects currently represent the single-precision, floating-point data type single. The model uses these objects to set signal data types, including the input and output signals of the Discrete Filter blocks.
Suppose that during simulation and execution of the generated code, you want each of these subsystems to switch between different numerator coefficients based on a variable whose value you control.
Store Parameter Values in Array of Structures
Store the existing set of numerator coefficients in a Simulink.Parameter object whose value is a structure. Each field of the structure stores the coefficients for one of the Discrete Filter blocks.
lowBlock = ['sldemo_fuelsys_dd_controller/fuel_calc/'... 'switchable_compensation/low_mode/Discrete Filter']; richBlock = ['sldemo_fuelsys_dd_controller/fuel_calc/'... 'switchable_compensation/rich_mode/Discrete Filter']; params.lowNumerator = eval(get_param(lowBlock,'Numerator')); params.richNumerator = eval(get_param(richBlock,'Numerator')); params = Simulink.Parameter(params);
Copy the value of params into a temporary variable. Modify the field values in this temporary structure, and assign the modified structure as the second element of params.
temp = params.Value;
temp.lowNumerator = params.Value.lowNumerator * 2;
temp.richNumerator = params.Value.richNumerator * 2;
params.Value(2) = temp;
clear temp
The value of params is an array of two structures. Each structure stores one set of filter coefficients.
Create Variable to Switch Between Parameter Sets
Create a Simulink.Parameter object named Ctrl.
Ctrl = Simulink.Parameter(2);
Ctrl.DataType = 'uint8';
In the low_mode subsystem, in the Discrete Filter block dialog box, set the Numerator parameter to the expression params(Ctrl).lowNumerator.
set_param(lowBlock,'Numerator','params(Ctrl).lowNumerator');
In the Discrete Filter block in the rich_mode subsystem, set the value of the Numerator parameter to params(Ctrl).richNumerator.
set_param(richBlock,'Numerator','params(Ctrl).richNumerator');
The expressions select one of the structures in params by using the variable Ctrl. The expressions then dereference one of the fields in the structure. The field value sets the values of the numerator coefficients.
To switch between the sets of coefficients, you change the value of Ctrl to the corresponding index in the array of structures.
Use Bus Object as Data Type of Array of Structures
Optionally, create a Simulink.Bus object to use as the data type of the array of structures. You can:
Control the shape of the structures.
For each field, control characteristics such as data type and physical units.
Control the name of the
structtype in the generated code.
Use the function Simulink.Bus.createObject to create the object and rename the object as paramsType.
Simulink.Bus.createObject(params.Value)
paramsType = slBus1;
clear slBus1
You can use the Simulink.NumericType objects from the data dictionary to control the data types of the structure fields. In the bus object, use the name of a data type object to set the DataType property of each element.
paramsType.Elements(1).DataType = 's16En15'; paramsType.Elements(2).DataType = 's16En7';
Use the bus object as the data type of the array of structures.
params.DataType = 'Bus: paramsType';
Use Enumerated Type for Switching Variable
Optionally, use an enumerated type as the data type of the switching variable. You can associate each of the parameter sets with a meaningful name and restrict the allowed values of the switching variable.
Create an enumerated type named FilterCoeffs. Create an enumeration member for each of the structures in params. Set the underlying integer value of each enumeration member to the corresponding index in params.
Simulink.defineIntEnumType('FilterCoeffs',{'Weak','Aggressive'},[1 2])
Use the enumerated type as the data type of the switching variable. Set the value of the variable to Aggressive, which corresponds to the index 2.
Ctrl.Value = FilterCoeffs.Aggressive;
Add New Objects to Data Dictionary
Add the objects that you created to the data dictionary sldemo_fuelsys_dd_controller.sldd.
dictObj = Simulink.data.dictionary.open('sldemo_fuelsys_dd_controller.sldd'); sectObj = getSection(dictObj,'Design Data'); addEntry(sectObj,'Ctrl',Ctrl) addEntry(sectObj,'params',params) addEntry(sectObj,'paramsType',paramsType)
You can also store enumerated types in data dictionaries. However, you cannot import the enumerated type in this case because you cannot save changes to sldemo_fuelsys_dd_controller.sldd. For more information about storing enumerated types in data dictionaries, see Enumerations in Data Dictionary.
Switch Between Parameter Sets During Simulation
Open the example model sldemo_fuelsys_dd, which references the controller model sldemo_fuelsys_dd_controller.
open_system('sldemo_fuelsys_dd')

Set the simulation stop time to Inf so that you can interact with the model during simulation.
Begin a simulation run and open the Scope block dialog box. The scope shows that the fuel flow rate (the fuel signal) oscillates with significant amplitude during normal operation of the engine.
In the Model Explorer, view the contents of the data dictionary sldemo_fuelsys_dd_controller.sldd. Set the value of Ctrl to FilterCoeffs.Weak.
Update the sldemo_fuelsys_dd model diagram. The scope shows that the amplitude of the fuel rate oscillations decreases due to the less aggressive filter coefficients.
Stop the simulation.
Generate and Inspect Code
If you have Simulink Coder software, you can generate code that enables you to switch between the parameter sets during code execution.
In the Model Explorer, view the contents of the data dictionary sldemo_fuelsys_dd_controller.sldd. In the Contents pane, set Column View to Storage Class.
Use the StorageClass column to apply the storage class ExportedGlobal to params so that the array of structures appears as a tunable global variable in the generated code. Apply the same storage class to Ctrl so that you can change the value of the switching variable during code execution.
Alternatively, to configure the objects, use these commands:
tempEntryObj = getEntry(sectObj,'params'); params = getValue(tempEntryObj); params.StorageClass = 'ExportedGlobal'; setValue(tempEntryObj,params); tempEntryObj = getEntry(sectObj,'Ctrl'); Ctrl = getValue(tempEntryObj); Ctrl.StorageClass = 'ExportedGlobal'; setValue(tempEntryObj,Ctrl);
Generate code from the controller model.
slbuild('sldemo_fuelsys_dd_controller')
### Searching for referenced models in model 'sldemo_fuelsys_dd_controller'. ### Total of 1 models to build. ### Starting build procedure for: sldemo_fuelsys_dd_controller ### Successful completion of code generation for: sldemo_fuelsys_dd_controller Build Summary Top model targets: Model Build Reason Status Build Duration ================================================================================================================== sldemo_fuelsys_dd_controller Information cache folder or artifacts were missing. Code generated. 0h 0m 23.737s 1 of 1 models built (0 models already up to date) Build duration: 0h 0m 26.292s
In the code generation report, view the header file sldemo_fuelsys_dd_controller_types.h. The code defines the enumerated data type FilterCoeffs.
file = fullfile('sldemo_fuelsys_dd_controller_ert_rtw',... 'sldemo_fuelsys_dd_controller_types.h'); coder.example.extractLines(file,'#ifndef DEFINED_TYPEDEF_FOR_FilterCoeffs_',... '#ifndef DEFINED_TYPEDEF_FOR_paramsType_',1,0)
#ifndef DEFINED_TYPEDEF_FOR_FilterCoeffs_
#define DEFINED_TYPEDEF_FOR_FilterCoeffs_
typedef enum {
Weak = 1, /* Default value */
Aggressive
} FilterCoeffs;
#endif
The code also defines the structure type paramsType, which corresponds to the Simulink.Bus object. The fields use the single-precision, floating-point data type from the model.
coder.example.extractLines(file,'#ifndef DEFINED_TYPEDEF_FOR_paramsType_',... '#ifndef DEFINED_TYPEDEF_FOR_sld_FuelModes_',1,0)
#ifndef DEFINED_TYPEDEF_FOR_paramsType_
#define DEFINED_TYPEDEF_FOR_paramsType_
typedef struct {
real32_T lowNumerator[2];
real32_T richNumerator[2];
} paramsType;
#endif
View the source file sldemo_fuelsys_dd_controller.c. The code uses the enumerated type to define the switching variable Ctrl.
file = fullfile('sldemo_fuelsys_dd_controller_ert_rtw',... 'sldemo_fuelsys_dd_controller.c'); coder.example.extractLines(file,'FilterCoeffs Ctrl = Aggressive;',... '/* Block signals (default storage) */',1,0)
FilterCoeffs Ctrl = Aggressive; /* Variable: Ctrl
* Referenced by:
* '<S12>/Discrete Filter'
* '<S13>/Discrete Filter'
*/
The code also defines the array of structures params.
coder.example.extractLines(file,'/* Exported block parameters */',... '/* Variable: params',1,1)
/* Exported block parameters */
paramsType params[2] = { {
{ 8.7696F, -8.5104F },
{ 0.0F, 0.2592F }
}, { { 17.5392F, -17.0208F },
{ 0.0F, 0.5184F }
} } ; /* Variable: params
The code algorithm in the model step function uses the switching variable to index into the array of structures.
To switch between the parameter sets stored in the array of structures, change the value of Ctrl during code execution.
Close the connections to the data dictionary. This example discards unsaved changes. To save the changes, use the '-save' option.
Simulink.data.dictionary.closeAll('sldemo_fuelsys_dd_controller.sldd','-discard')