Active Disturbance Rejection Control
Libraries:
Simulink Control Design /
Adaptive Control
Description
The Active Disturbance Rejection Control block lets you design active disturbance rejection control (ADRC) for a plant with unknown dynamics and internal and external disturbances. ADRC is a model-free control technique that requires only an approximation of the plant dynamics to design controllers that provide robust disturbance rejection.
The block uses a first-order or second-order model approximation of the known system dynamics along with the unknown dynamics and disturbances modeled as an extended state of the plant. Typically, you determine this order from the open-loop step response of your plant in the operating range.
First-order approximation —
Second-order approximation —
Here:
y(t) is the plant output.
u(t) is the input signal.
b0 is the critical gain, which is the estimated gain that describes the plant response to an input u(t).
f(t) is the total disturbance, which includes unknown dynamics and other disturbances.
The block uses an extended state observer (ESO) to estimate f(t) and implements disturbance rejection control by reducing the effect of estimated disturbances on the known part of model approximation. To tune ADRC, set appropriate time domain, model type and critical gain, controller and observer bandwidths, and initial conditions.
For more information, see Active Disturbance Rejection Control.
Examples
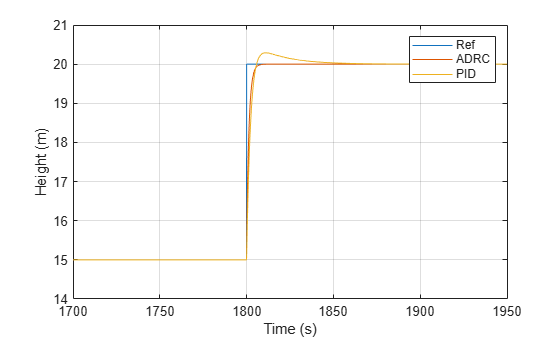
Design Active Disturbance Rejection Control for Water-Tank System
Design ADRC for a water-tank model and compare performance against a gain-scheduled PID controller.

Design Active Disturbance Rejection Control for Boost Converter
Design ADRC for a boost converter model and compare performance against a PID controller tuned on a linearized model.
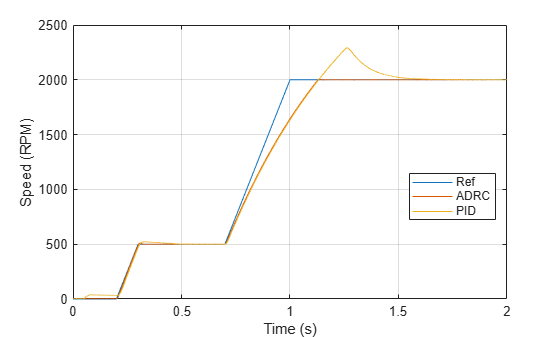
Design Active Disturbance Rejection Control for BLDC Speed Control Using PWM
Design ADRC for a brushless DC motor speed controller using pulse width modulation.

Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.