Get Started with Simscape Multibody
Simscape™ Multibody™ provides a multibody simulation environment for 3D mechanical systems, such as robots, vehicle suspensions, construction equipment, and aircraft landing gear. You can model multibody systems using blocks representing bodies, joints, constraints, force elements, and sensors. Simscape Multibody formulates and solves the equations of motion for the complete mechanical system. You can import complete CAD assemblies, including all masses, inertias, joints, constraints, and 3D geometry, into your model. An automatically generated 3D animation lets you visualize the system dynamics.
Simscape Multibody helps you develop control systems and test system-level performance. You can parameterize your models using MATLAB® variables and expressions, and design control systems for your multibody system in Simulink®. You can integrate hydraulic, electrical, pneumatic, and other physical systems into your model using components from the Simscape family of products. To deploy your models to other simulation environments, including hardware-in-the-loop (HIL) systems, Simscape Multibody supports C-code generation.
Tutorials
- Create a Multibody Model
To model a multibody system and analyze its dynamic behaviors with Simscape Multibody, you can use block diagrams or MATLAB classes. - Model a Simple Link
Model a simple body with solid properties and connection frames parameterized in terms of MATLAB variables. - Model a Simple Pendulum
Model a basic multibody system comprising a simple body and a revolute joint. - Analyze a Single Pendulum
Apply forces and torques to a basic multibody model. Sense motion variables at joints and visualize these variables using MATLAB plots. - Model a Rigid Body in MATLAB
This example shows how to create a rigid body by using MATLAB classes of the Simscape Multibody. - Model a Multibody System in MATLAB
This example shows how to model a four-bar system using the MATLAB classes of Simscape Multibody. - Analyze System Dynamics in MATLAB
This example shows how to analyze the dynamics of a four-bar linkage system using the MATLAB classes of Simscape Multibody.
About Multibody Modeling
Block Diagram Workflows
MATLAB Classes Workflows
Interactive Learning
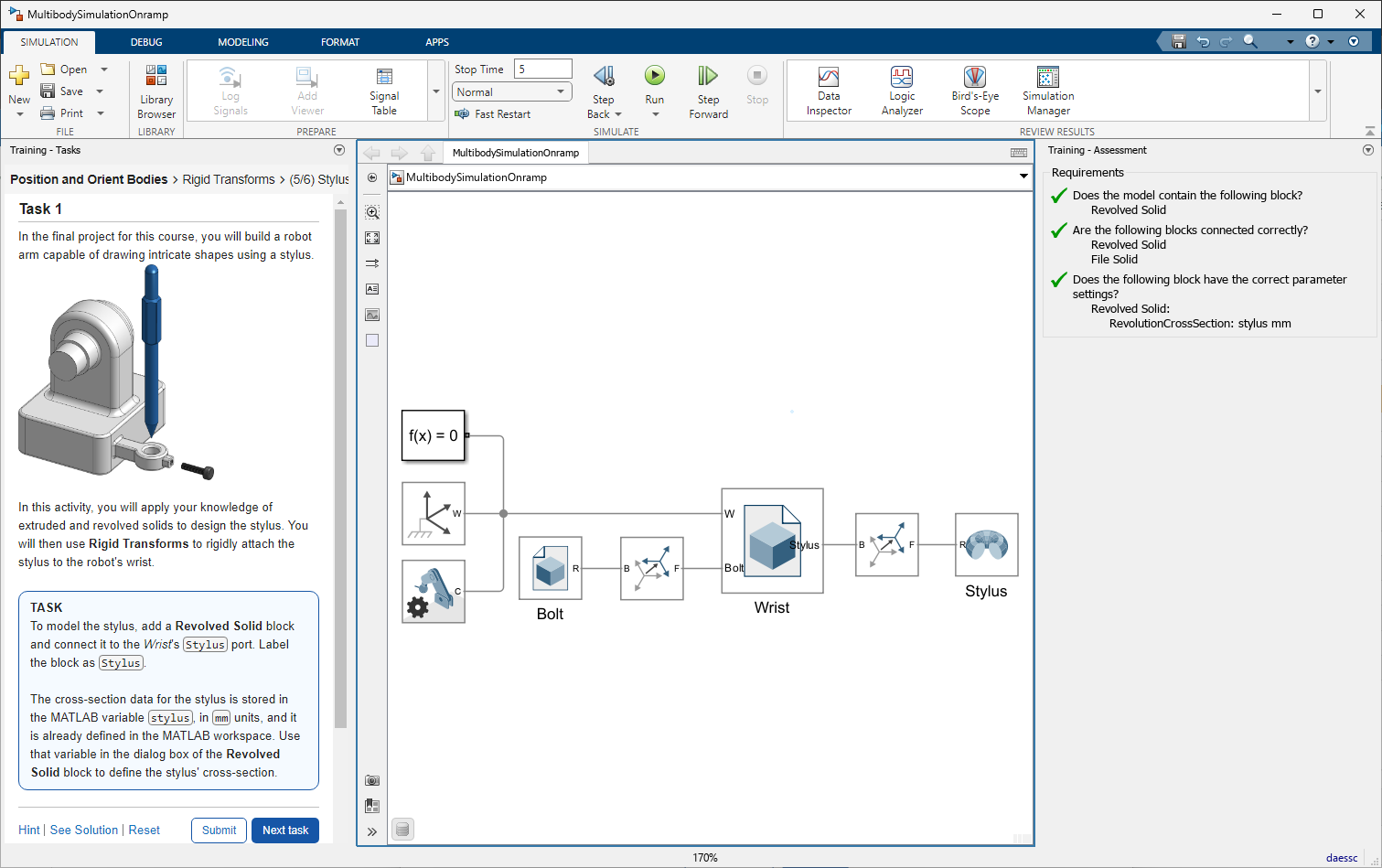
Multibody Simulation Onramp
Free, self-paced, interactive Simscape
Multibody course