SM Current Reference Generator
Synchronous machine current reference generator

Libraries:
Simscape /
Electrical /
Control /
SM Control
Description
The SM Current Reference Generator block implements a current reference generator for synchronous machine (SM) current control in the rotor d-q reference frame.
Defining Equations
The SM Current Reference Generator block can obtain the current reference using one of these methods:
Zero d-axis control (ZDAC).
Lookup tables.
For the ZDAC method, the block sets:
The d-axis current reference to zero:
The field current reference using the torque reference:
where if,max is the maximum field current and Tmax is the maximum torque.
The q-axis current reference using the torque equation:
where Tref is the reference torque input and Kt is the torque constant of the synchronous machine expressed by the simplified torque equation .
For operation below the base speed of the synchronous machine, ZDAC is a suitable method. Above base speed, a field weakening controller is required to adjust the d-axis reference.
To pregenerate the current references for several operating points, define three lookup tables using the lookup tables approach:
and
Examples

HESM Torque Control
Control the torque in a hybrid excitation synchronous machine (HESM) based electrical-traction drive. Permanent magnets and an excitation winding excite the HESM. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and through a controlled four quadrant chopper for the rotor winding. An ideal angular velocity source provides the load. The Control subsystem uses an open-loop approach to control the torque and a closed-loop approach to control the current. At each sample instant, the torque request is converted to relevant current references. The current control is PI-based. The simulation uses several torque steps in both the motor and generator modes. The Visualization subsystem contains scopes that allow you to see the simulation results.

HESM Velocity Control
Control the rotor angular velocity in a hybrid excitation synchronous machine (HESM) based electrical-traction drive. Permanent magnets and an excitation winding excite the HESM. A high-voltage battery feeds the HESM through a controlled three-phase converter for the stator windings and through a controlled four quadrant chopper for the rotor winding. An ideal torque source provides the load. The Control subsystem includes a multi-rate PI-based cascade control structure. The control structure has an outer angular-velocity-control loop and three inner current-control loops. The Visualization subsystem contains scopes that allow you to see the simulation results.
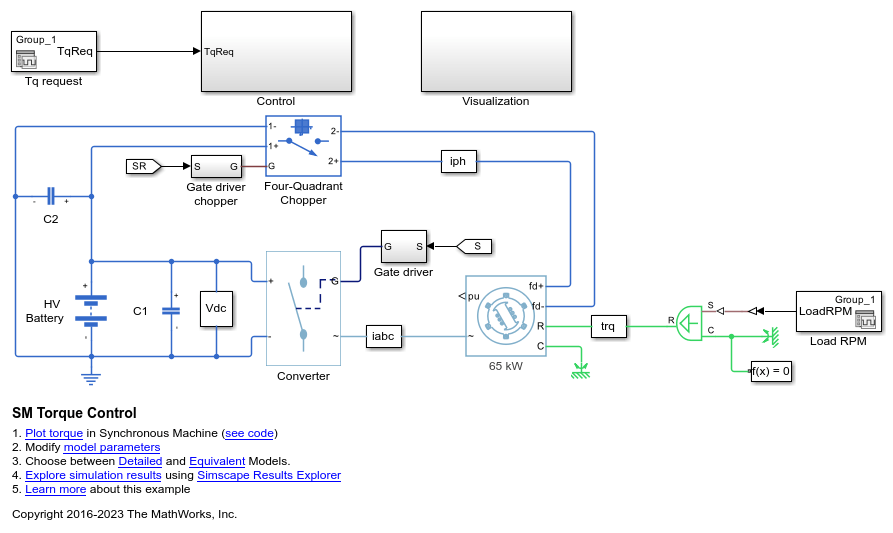
SM Torque Control
Control the torque in a synchronous machine (SM) based electrical-traction drive. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and a controlled four quadrant chopper for the rotor winding. An ideal angular velocity source provides the load. The Control subsystem uses an open-loop approach to control the torque and a closed-loop approach to control the current. At each sample instant, the torque request is converted to relevant current references. The current control is PI-based. The simulation uses several torque steps in both motor and generator modes. The task scheduling is implemented as a Stateflow® state machine. The Visualization subsystem contains scopes that allow you to see the simulation results.

SM Velocity Control
Control the rotor angular velocity in a synchronous machine (SM) based electrical-traction drive. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and a controlled four quadrant chopper for the rotor winding. An ideal torque source provides the load. The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer angular-velocity-control loop and three inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The Visualization subsystem contains scopes that allow you to see the simulation results.

Synchronous Machine State-Space Control
Control currents in a synchronous machine (SM) based traction drive using state-space control. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and through a controlled two-quadrant chopper for the rotor winding. An ideal angular velocity source provides the load. The SM operates below the base speed. At each sample instant, the torque request is converted to relevant current references using the zero d-axis control approach. A state-feedback controller controls the currents in the rotor reference frame. A Luenberger observer obtains the velocity-dependent feedforward pre-control terms. The simulation uses several torque steps in both motor and generator modes. The task scheduling is implemented as a Stateflow® state machine. The Scopes subsystem contains scopes that allow you to see the simulation results.
Ports
Input
Output
Parameters
References
[1] Girardin, A., and G. Friedrich. "Optimal control for a wound rotor synchronous starter generator." Industry Applications Conference, 2006, pp. 14-19.
[2] Carpiuc, S., C. Lazar, and D. I. Patrascu. "Optimal Torque Control of the Externally Excited Synchronous Machine." Control Engineering and Applied Informatics, 14(2), 2012, pp. 80-88.
Extended Capabilities
Version History
Introduced in R2017b