Stepper Motor Driver
Driver for stepper motor
Libraries:
Simscape /
Electrical /
Electromechanical /
Reluctance & Stepper
Description
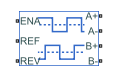
The Stepper Motor Driver block represents a driver for a stepper motor. It creates the pulse trains, A and B, required to control the motor. This block initiates a step each time the voltage at the ENA port rises above the Enable threshold voltage parameter value.
If the voltage at the REV port is less than or equal to the Reverse threshold voltage parameter value, pulse A leads pulse B by 90 degrees. If the voltage at the REV port is greater than the Reverse threshold voltage value, pulse B leads pulse A by 90 degrees and the motor direction is reversed.
At time zero, pulse A is positive and pulse B is negative.
If you set the Stepping mode parameter to Half
stepping, the Stepper Motor Driver
block can produce the output waveforms required for half stepping. In this mode, there
is an intermediate state between the full steps, in which just one of the
A or the B half-windings is powered. As a
result, the step size is half of the stepper motor’s full step size. At half steps,
windings that are not powered are short-circuited. This approximates the effect of a
freewheeling diode connected across the windings.
Microstepping
To advance the rotor of a fraction of a step instead of a full or half step, set
the Stepping mode parameter
to Microstepping. This mode enables circular
current-controlled microstepping and increases the resolution in the position of the
rotor. To select the fractional stepping resolution, specify the value of the
Number of microsteps per step parameter.
The block initiates a micro-step each time the voltage at the ENA port rises above the value of the Enable threshold voltage parameter.
In microstepping mode, the current in each motor winding follows a discretized sinusoidal waveform. The amplitude of the current waveform is equal to the value of the Maximum continuous current per phase parameter.
To increase or decrease the current in each microstep, the driver applies a positive or negative over-voltage until the current matches the target value.
If you set the Power supply parameter to
Internal, the applied over-voltage is equal to the
value of the Supply voltage parameter. If you set the
Power supply parameter to
External the applied over-voltage is equal to the
voltage between the VM and GND ports.
Averaged Mode
If you set the Simulation mode parameter to
Averaged, both for a Stepper Motor
Driver block and for the Stepper
Motor block connected to it, then the individual steps are not
simulated. This can be a good way to speed up simulation. The
Averaged mode assumes that the external controller
provides a step rate demand. This step rate demand is determined from the voltage
applied between the ENA and REF ports on
the Stepper Motor Driver block, by multiplying this
voltage by the value of the Step rate sensitivity parameter.
The rotation direction is set by the REF port in the same way
as for the Stepping mode.
Averaged mode needs to communicate the step rate demand
and also output voltage amplitude information to the Stepper
Motor block. To do this, the step rate demand is applied as an
equivalent voltage across the A+ and A-
ports. Similarly the output voltage amplitude information is conveyed by applying a
steady-state voltage across the B+ and B-
ports with value equal to the Output voltage amplitude
parameter.
Examples

Stepper Motor with Control
Model a controlled permanent magnet stepper motor by using the Stepper Motor and Stepper Motor Driver blocks. The model has two controller options: one to control position and one to control speed. To change the controller type, right-click the Controller subsystem, select Variant > Label Mode Active Choice, and then select Position or Speed. The stepper has a full step size of 1.8 degrees. In position control mode, the input to the Ref port is the desired number of steps. In speed control mode, the input to the Ref port is the desired number of steps per second.

Stepper Motor Averaged Mode
The Stepper Motor simulating in Stepping and Averaged simulation modes. The purpose of Averaged mode is faster simulation for any loads that do not cause slip. To avoid incorrect interpretation of results, the stepper motor has an approximate detection of slip which can be set to generate a warning or an error.
Assumptions and Limitations
To use
Averagedmode, the Stepper Motor Driver block must be directly connected to a Stepper Motor block also running inAveragedmode.When changing from
SteppingtoAveragedmode and back, you must modify your upstream blocks that provide the input voltages to the Stepper Motor Driver block. One way to achieve this easily is to use Simulink® variant subsystems.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2008a