Motorcycle Chain
Libraries:
Powertrain Blockset /
Drivetrain /
Couplings
Vehicle Dynamics Blockset /
Powertrain /
Drivetrain /
Couplings
Description
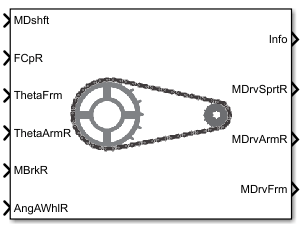
The Motorcycle Chain block implements the dynamic effects of a motorcycle chain on the Motorcycle Body Longitudinal In-Plane block, including dynamic tension and moment drive coupling.
This figure shows how the chain relates geometrically to the motorcycle frame, rear arm, and rear wheel.
| Frame | Variable in Figure | Description |
|---|---|---|
Motorcycle main frame
| OFrm | Main frame origin |
Examples

Longitudinal Motorcycle Braking Test Reference Application
Simulate an in-plane motorcycle model undergoing a braking test. Use for motorcycle dynamics ride and handling analysis and chassis controls development.
Ports
Input
Output
Parameters
References
[1] Giner, David Moreno. “Symbolic-Numeric Tools for the Analysis of Motorcycle Dynamics. Development of a Virtual Rider for Motorcycles Based on Model Predictive Control.” PhD diss., Universidad Miguel Hernández de Elche, 2016.
Extended Capabilities
Version History
Introduced in R2021b