vision.KalmanFilter
Correction of measurement, state, and state estimation error covariance
Description
The Kalman filter object is designed for tracking. You can use it to predict a physical object's future location, to reduce noise in the detected location, or to help associate multiple physical objects with their corresponding tracks. A Kalman filter object can be configured for each physical object for multiple object tracking. To use the Kalman filter, the object must be moving at constant velocity or constant acceleration.
Creation
The Kalman filter algorithm involves two steps, prediction and correction (also known as the update step). The first step uses previous states to predict the current state. The second step uses the current measurement, such as object location, to correct the state. The Kalman filter implements a discrete time, linear State-Space System.
Note
To make configuring a Kalman filter easier, you can use the configureKalmanFilter object to configure a Kalman filter. It sets up the
filter for tracking a physical object in a Cartesian coordinate system, moving with constant
velocity or constant acceleration. The statistics are the same along all dimensions. If you
need to configure a Kalman filter with different assumptions, do not use the function, use
this object directly.
In the state space system, the state transition model, A, and the measurement model, H, are set as follows:
| Variable | Value |
|---|---|
| A | [1 1 0 0; 0 1 0 0; 0 0 1 1; 0 0 0 1] |
| H | [1 0 0 0; 0 0 1 0] |
Syntax
Description
kalmanFilter = vision.KalmanFilter
kalmanFilter = vision.KalmanFilter(StateTransitionModel,MeasurementModel)
kalmanFilter = vision.KalmanFilter(StateTransitionModel,MeasurementModel,ControlModel,Name,Value)Name,Value pair arguments. Unspecified properties have default
values.
Properties
Object Functions
Use the predict and correct functions based on detection results. Use the distance function to find the best matches.
When the tracked object is detected, use the
predictandcorrectfunctions with the Kalman filter object and the detection measurement. Call the functions in the following order:[...] = predict(
kalmanFilter); [...] = correct(kalmanFilter,measurement);When the tracked object is not detected, call the
predictfunction, but not thecorrectfunction. When the tracked object is missing or occluded, no measurement is available. Set the functions up with the following logic:[...] = predict(
kalmanFilter); If measurement exists [...] = correct(kalmanFilter,measurement); endIf the tracked object becomes available after missing for the past t-1 contiguous time steps, you can call the
predictfunction t times. This syntax is particularly useful to process asynchronous video.. For example,for i = 1:k [...] = predict(kalmanFilter); end [...] = correct(kalmanFilter,measurement)
Examples
Track the location of a physical object moving in one direction.
Generate synthetic data which mimics the 1-D location of a physical object moving at a constant speed.
detectedLocations = num2cell(2*randn(1,40) + (1:40));
Simulate missing detections by setting some elements to empty.
detectedLocations{1} = [];
for idx = 16: 25
detectedLocations{idx} = [];
endCreate a figure to show the location of detections and the results of using the Kalman filter for tracking.
figure; hold on; ylabel('Location'); ylim([0,50]); xlabel('Time'); xlim([0,length(detectedLocations)]);
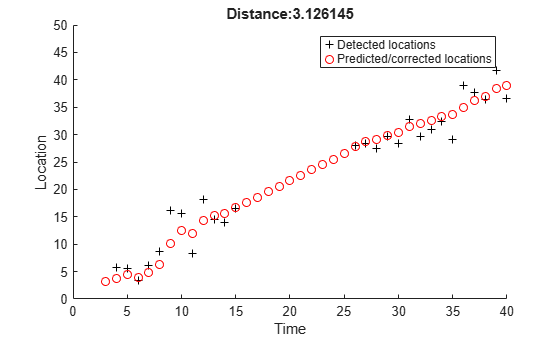
Create a 1-D, constant speed Kalman filter when the physical object is first detected. Predict the location of the object based on previous states. If the object is detected at the current time step, use its location to correct the states.
kalman = []; for idx = 1: length(detectedLocations) location = detectedLocations{idx}; if isempty(kalman) if ~isempty(location) stateModel = [1 1;0 1]; measurementModel = [1 0]; kalman = vision.KalmanFilter(stateModel,measurementModel,'ProcessNoise',1e-4,'MeasurementNoise',4); kalman.State = [location, 0]; end else trackedLocation = predict(kalman); if ~isempty(location) plot(idx, location,'k+'); d = distance(kalman,location); title(sprintf('Distance:%f', d)); trackedLocation = correct(kalman,location); else title('Missing detection'); end pause(0.2); plot(idx,trackedLocation,'ro'); end end legend('Detected locations','Predicted/corrected locations');
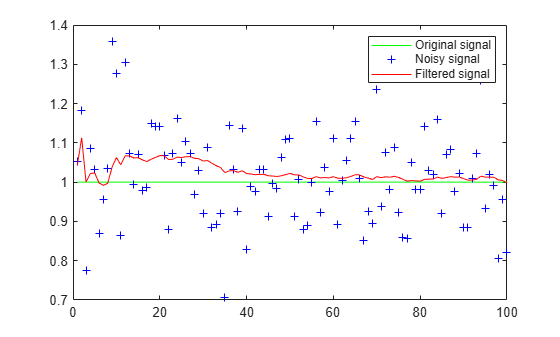
Use Kalman filter to remove noise from a random signal corrupted by a zero-mean Gaussian noise.
Synthesize a random signal that has value of 1 and is corrupted by a zero-mean Gaussian noise with standard deviation of 0.1.
x = 1; len = 100; z = x + 0.1 * randn(1,len);
Remove noise from the signal by using a Kalman filter. The state is expected to be constant, and the measurement is the same as state.
stateTransitionModel = 1; measurementModel = 1; obj = vision.KalmanFilter(stateTransitionModel,measurementModel,'StateCovariance',1,'ProcessNoise',1e-5,'MeasurementNoise',1e-2); z_corr = zeros(1,len); for idx = 1: len predict(obj); z_corr(idx) = correct(obj,z(idx)); end
Plot results.
figure, plot(x * ones(1,len),'g-'); hold on; plot(1:len,z,'b+',1:len,z_corr,'r-'); legend('Original signal','Noisy signal','Filtered signal');
Algorithms
References
[1] Welch, Greg, and Gary Bishop, An Introduction to the Kalman Filter, TR 95–041. University of North Carolina at Chapel Hill, Department of Computer Science.
[2] Blackman, S. Multiple-Target Tracking with Radar Applications. Artech House, Inc., pp. 93, 1986.
Extended Capabilities
Version History
Introduced in R2012b