Simulink Control Design
Linéariser des modèles et concevoir des systèmes de contrôle
Vous avez des questions ? Contacter un commercial.
Vous avez des questions ? Contacter un commercial.
Simulink Control Design vous permet de concevoir et d'analyser des systèmes de contrôle modélisés dans Simulink. Vous pouvez régler automatiquement des architectures de contrôle arbitraires SISO et MIMO, y compris des contrôleurs PID. Le réglage automatique du PID peut-être déployé sur du software embarqué afin de calculer automatiquement et en temps réel les gains PID. Vous pouvez également implémenter des algorithmes de contrôle actif de rejet des perturbations, de contrôle par recherche d'extremum et de contrôle adaptatif à modèle de référence pour les applications où le contrôleur doit s'adapter aux changements de la dynamique du système physique et des perturbations.
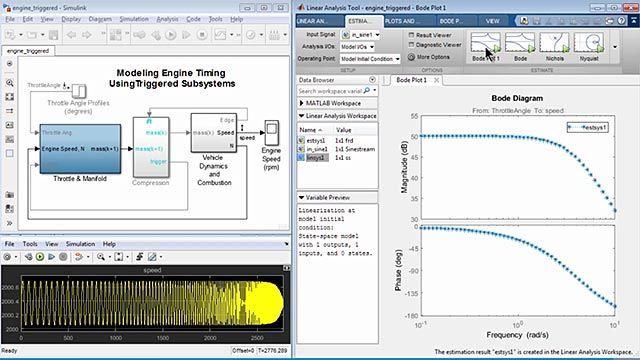
Vous pouvez trouver des points de fonctionnement et calculer les linéarisations exactes des modèles Simulink dans diverses conditions de fonctionnement. Simulink Control Design offre des outils qui vous permettent de calculer les réponses en fréquence basées sur les simulations sans modifier votre modèle.
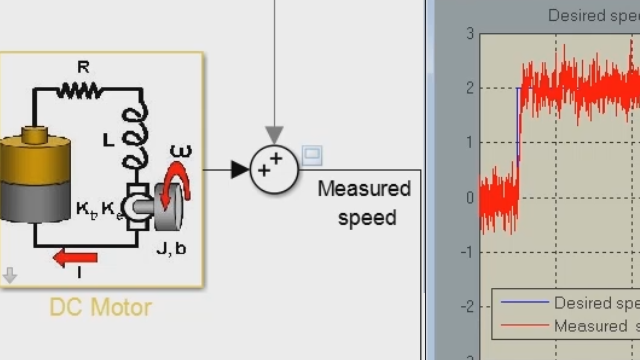
Réglez automatiquement les contrôleurs PID dans un modèle Simulink avec l'application PID Tuner. Déployez et exécutez l'algorithme de réglage du PID sur votre hardware embarqué en générant du code C pour le bloc Closed-Loop PID Autotuner.
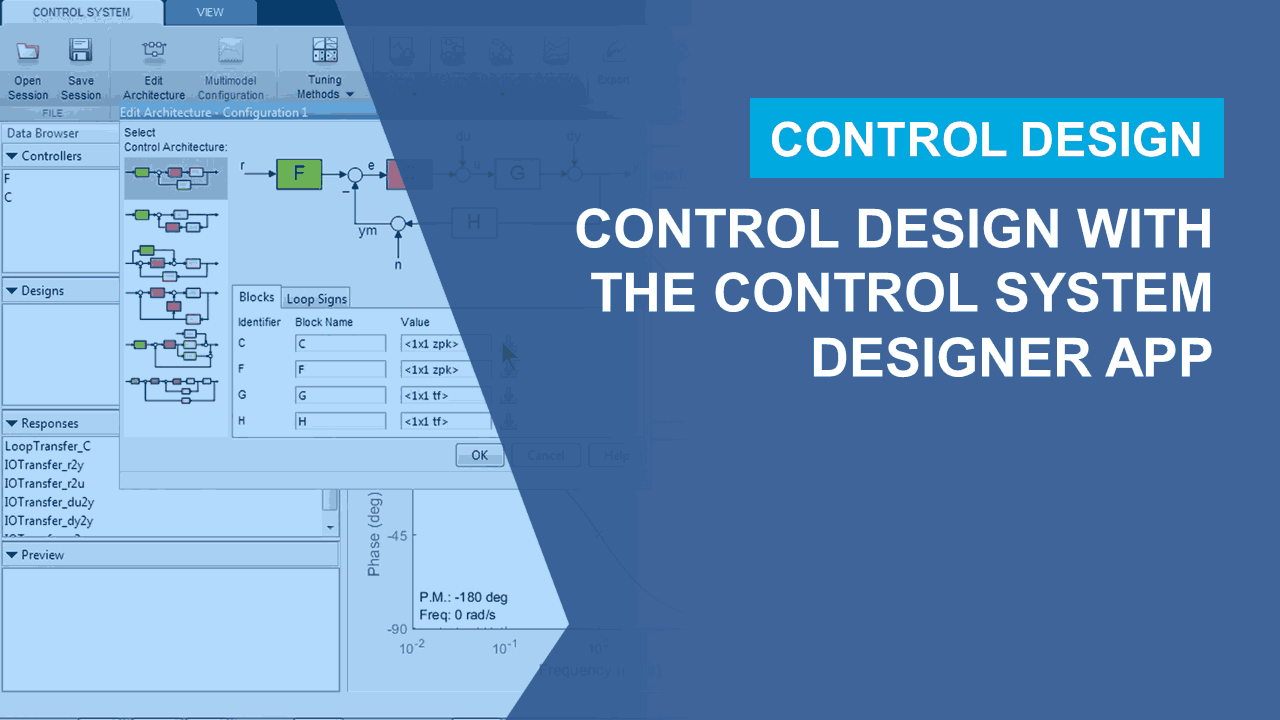
Réglez les boucles de contrôle SISO dans Simulink en utilisant les outils de réglage automatique et graphique avec l'application Control System Designer.
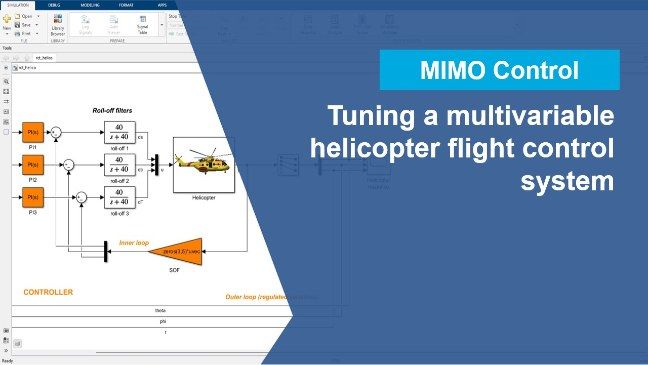
Réglez automatiquement les structures de contrôle arbitraires SISO et MIMO décentralisées, modélisées dans Simulink, pour respecter les exigences du design dans les domaines fréquentiel et temporel avec l'application Control System Tuner.
Réglez automatiquement les contrôleurs à gains séquencés pour des processus non-linéaires ou non-stationnaires pour répondre aux exigences de performances dans le domaine de fonctionnement de votre système.

Implémentez des techniques de contrôle basées sur l'apprentissage et guidées par les données avec des blocs Simulink pour le contrôle actif de rejet des perturbations, le contrôle par recherche d'extremum, le contrôle adaptatif à modèle de référence et l’application des contraintes.

Trouvez les points de fonctionnement de votre modèle Simulink en utilisant les spécifications ou les temps de simulation. Utilisez l'application Steady State Manager pour trouver les points de fonctionnement de votre modèle de manière interactive à partir des spécifications de l'état, des entrées et des sorties.

Linéarisez des modèles Simulink continus, discrets et à fréquences d'échantillonnage multiples en utilisant l'application Model Linearizer. Identifiez et réglez les problèmes courants de linéarisation avec l'objet LinearizationAdvisor.
Estimez les réponses en fréquence et examinez les caractéristiques fréquentielles des modèles Simulink en utilisant les données d'entrée-sortie. Déployez votre algorithme d'estimation en tant qu'application embarquée pour une estimation temps réel du système physique.
Utilisez les exemples d'applications de référence pour les systèmes de contrôle de vol, l'électronique de puissance, la robotique et d'autres applications afin de concevoir et analyser des contrôleurs pour les systèmes modélisés dans Simulink.

« Les outils MathWorks nous ont permis de simplifier notre processus de design en apportant un environnement intégré de création de fonctionnalités techniques et innovantes que nos clients souhaitaient. »
Laurence Lane, Haldex
Profitez de 30 jours pour tester.
Découvrez les tarifs et les produits.
Votre établissement propose peut-être déjà un accès à MATLAB, Simulink et d'autres produits complémentaires via la licence Campus-Wide.
Vous pouvez également sélectionner un site web dans la liste suivante :
Amériques
Europe
Asie-Pacifique